La photogrammétrie et les scanners laser 3D sont très répandus dans le secteur de la construction. Ils ont pourtant un inconvénient majeur souvent négligé.
[qodef_blockquote text="Ces méthodes de numérisation 3D nécessitent que la prise de vue soit réalisée en position fixe." title_tag="p" width=""]
Or, dans de nombreux cas il est plus pertinent d'être mobile :
- projets linéaires : voiries, chemins de fer...
- projets complexes d'accès : terrains escarpés, cavités...
- projet de grande étendue : villes, centres commerciaux...
Pour ces usages spécifiques, il existe des outils de "mobile-mapping" permettant de numériser tout en étant en mouvement.
Le SLAM : méthode de localisation et de cartographie simultanée
Définition
La notion de SLAM est assez complexe à définir. Une introduction utile pour en comprendre le principe est d’utiliser le dilemme insoluble de la poule et de l’œuf :
[qodef_blockquote text="Pour pondre un œuf il faut une poule. Mais pour obtenir une poule il faut d’abord un œuf." title_tag="p" width=""]
A la question “de l’œuf ou de la poule, qui était là le premier ?” il est tout bonnement impossible de trouver une réponse compte tenu de l’interconnexion permanente entre enfants et parents et du caractère évolutif du statut générationnel, les enfants devenant ensuite eux-mêmes parents.
Le SLAM trouve couramment des applications dans le monde des véhicules et robots autonomes.
[qodef_blockquote text="Pour se déplacer dans l’environnement, les véhicules autonomes doivent utiliser une cartographie, mais pour obtenir cette dernière, ils doivent de déplacer dans l’environnement... L'œuf ou la poule ?" title_tag="p" width=""]
Le SLAM est l'acronyme de “Simultaneous Localization and Mapping” qui signifie : Localisation et Cartographie Simultanées. Ce nom désigne l'ensemble des algorithmes offrant à un véhicule mobile robotisé la possibilité de cartographier un terrain inconnu tout en assurant sa propre localisation simultanément.
Ce processus se différencie des applications traditionnelles :
- Appareil capable de retrouver sa position dans une carte préalablement construite. Un GPS est un exemple, la donnée d’entrée étant la carte routière et la donnée de sortie une position.
- Appareil capable de cartographier un environnement inconnu. Un scanner laser 3D est un exemple, la donnée d’entrée étant une position et la donnée de sortie une cartographie de l’environnement.
Ces deux tâches sont bien connues et il existe des solutions à chacune des deux. Mais lorsque le robot ne dispose ni d'une carte de l'environnement, ni de sa position, il doit effectuer ces deux tâches simultanément. La localisation et cartographie simultanées (SLAM) traite donc deux questions importantes dans la robotique mobile.
- La première question est : Où suis-je ? La réponse à cette question définit la localisation du robot.
- La deuxième question concerne les caractéristiques de l'environnement du robot : À quoi ressemble l'environnement où je me trouve ?
[qodef_blockquote text="Le SLAM ne désigne donc ni un outil ni une méthode particulière, mais plutôt un concept." title_tag="p" width=""]
Celui-ci est composé d'un ensemble de méthodes permettant à un équipement de construire la carte d'un environnement, et en même temps de se localiser en utilisant cette carte. La trajectoire du véhicule et sa position sur la carte sont estimées au fur et à mesure, sans avoir besoin de connaissances a priori.
Ni l’oeuf ni la poule n’étaient là avant l’autre mais chacun a besoin de l’autre pour continuer d’avancer !
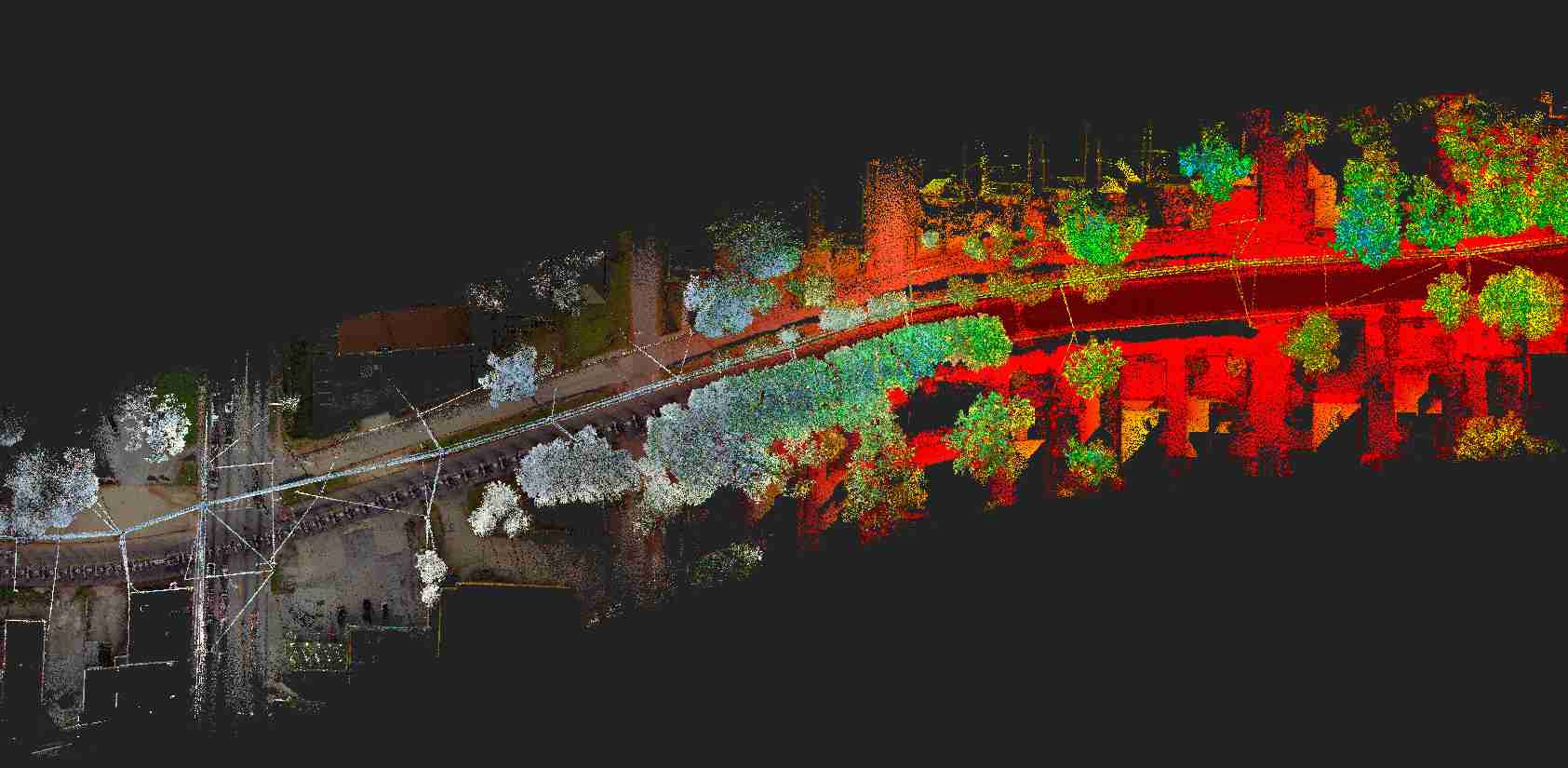
Les capteurs de numérisation 3D mobile
Cartographier son environnement est donc le premier volet du SLAM pour lequel la technologie la plus fréquemment employée est le LiDAR. Des capteurs dédiés ont été spécialement conçus pour répondre aux applications de mobile-mapping. Pour ne citer qu’un exemple, Velodyne est un acteur phare dans le monde du LiDAR mobile.

Les appareils de ce type reposent généralement sur une technologie de “peigne” : plusieurs faisceaux (fréquemment de 16 à 128) sont diffusés sur le même plan par une tête rotative, augmentant ainsi le nombre de points de mesure sur le même laps de temps.
La vélocité de la captation est en effet un point important lorsqu’on parle de numériser un espace depuis un appareil en mouvement.
Si le LiDAR reste l’instrument de mesure le plus pertinent et polyvalent, il ne saurait être la seule réponse aux applications de mobile-mapping nécessitant la collecte d’autre types de données. Créer des bulles photographiques à 360° et coloriser le nuage de points nécessitent par exemple l’implantation de capteurs photos sur l’appareil.
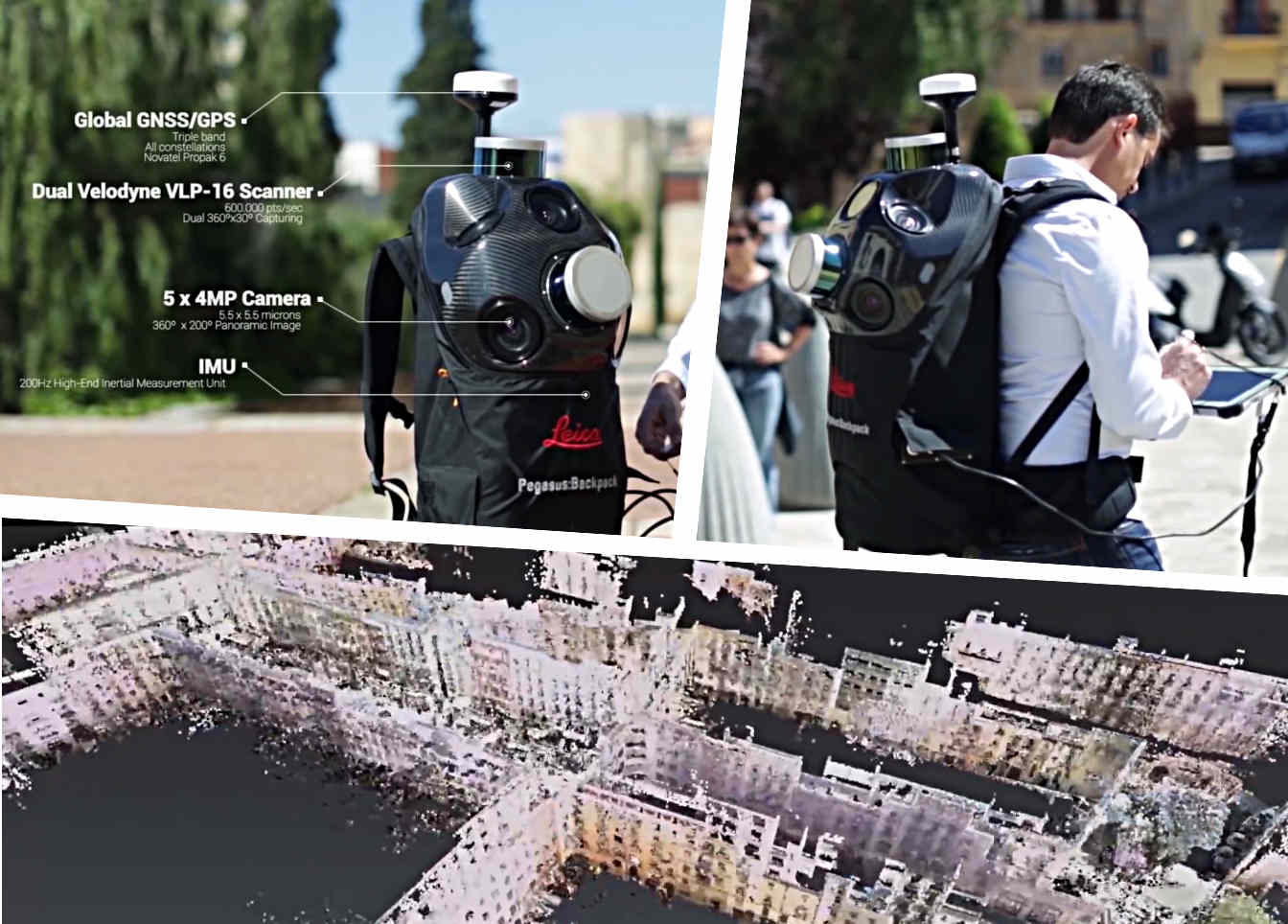
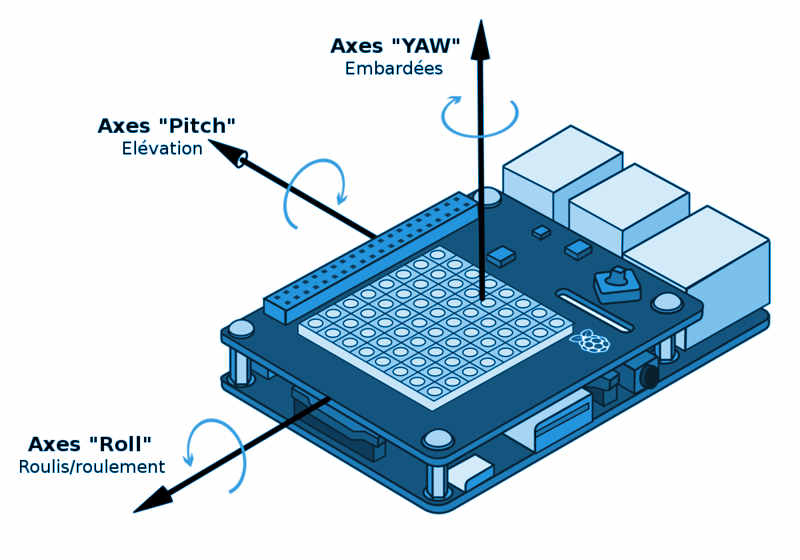
Une centrale à inertie ou centrale inertielle est un instrument utilisé en navigation, capable d'intégrer les mouvements d'un appareil mobile (accélération et vitesse angulaire) pour estimer son orientation (angles de roulis, de tangage et de lacet), sa vitesse linéaire et sa position.
L'estimation de position est relative au point de départ ou au dernier point de recalage.
La centrale inertielle dispense de l'utilisation d'un GPS
Il est important de noter qu’on ne parle absolument pas ici d’appareil de géopositionnement tel que le GPS. Une centrale inertielle a donc la capacité de mesurer de manière autonome une trajectoire dans un environnement totalement hermétique, contrairement à un appareil de géopositionnement par satellite, qui requiert la réception d’un signal lui indiquant sa position.
[qodef_blockquote text="La centrale à inertie n'utilise donc aucune information extérieure à l’appareil mobile." title_tag="p" width=""]
Malgré les progrès spectaculaires des systèmes de positionnement par satellites, notamment depuis l’arrivée de Galiléo, elle reste utilisée sur les avions de ligne dont la sécurité des vols ne peut reposer uniquement sur le géopositionnement par satellite, insuffisamment fiable.
Généralement, les véhicules militaires en sont également équipés pour pallier les brouillages du GPS susceptibles d'être rencontrés en temps de guerre.
Ces applications militaires sont à mettre face à des nécessités de numérisation 3D appliquée à la construction, comme par exemple la numérisation d’espaces souterrains sans réception d’un signal quelconque, ou bien la numérisation de sites contaminés ou incompatibles avec une présence humaine (sites radioactifs par exemple).
Fonctionnement d'une centrale inertielle
Une centrale à inertie est un équipement de navigation comportant six capteurs d'une précision métrologique :
- trois gyromètres mesurant les trois composantes du vecteur vitesse angulaire (vitesses de variation des angles de roulis, de tangage et de lacet)
- trois accéléromètres mesurant les trois composantes du vecteur force spécifique.
Sur la base de ces six capteurs, le calculateur de la centrale à inertie réalise l'intégration en temps réel des angles d'attitude (roulis, tangage et cap), du vecteur vitesse, et de la position.
[qodef_blockquote text="Une centrale inertielle ne peut pas donner une indication fiable sur de longues périodes, les dérives sont trop importantes et conduisent à un glissement progressif des données collectées." title_tag="p" width=""]
Dans le cas des applications de cartographie, cela signifie très concrètement que, sans points de correction, les nuages de points reconstruits ne seraient qu’une vision déformée de la réalité.
De ce fait, la plupart des solutions de mobile-mapping reposent sur le principe de l’hybridation : des appareils de positionnement tels que le GPS injectent des “points de calage” au modèle global afin d’ajouter des “points durs” au nuage de points.
 Un bon moyen de visualiser ce principe est de penser à un élastique tendu entre un point de départ et un point d'arrivée. En ajoutant des punaises le long de son parcours, on peut corriger la trajectoire et modifier la longueur de chaque segment en modifiant la tension. Plus on a de punaises à notre disposition, et plus il est facile de moduler le trajet de l'élastique.
Un bon moyen de visualiser ce principe est de penser à un élastique tendu entre un point de départ et un point d'arrivée. En ajoutant des punaises le long de son parcours, on peut corriger la trajectoire et modifier la longueur de chaque segment en modifiant la tension. Plus on a de punaises à notre disposition, et plus il est facile de moduler le trajet de l'élastique.
Évidemment, la fiabilité des points de calage est une condition essentielle.
L'ajout de points de calage
Il sera souvent nécessaire de placer des repères visuels de type sphères ou cibles dont les coordonnées géodésiques exactes ont été définies par un géomètre.
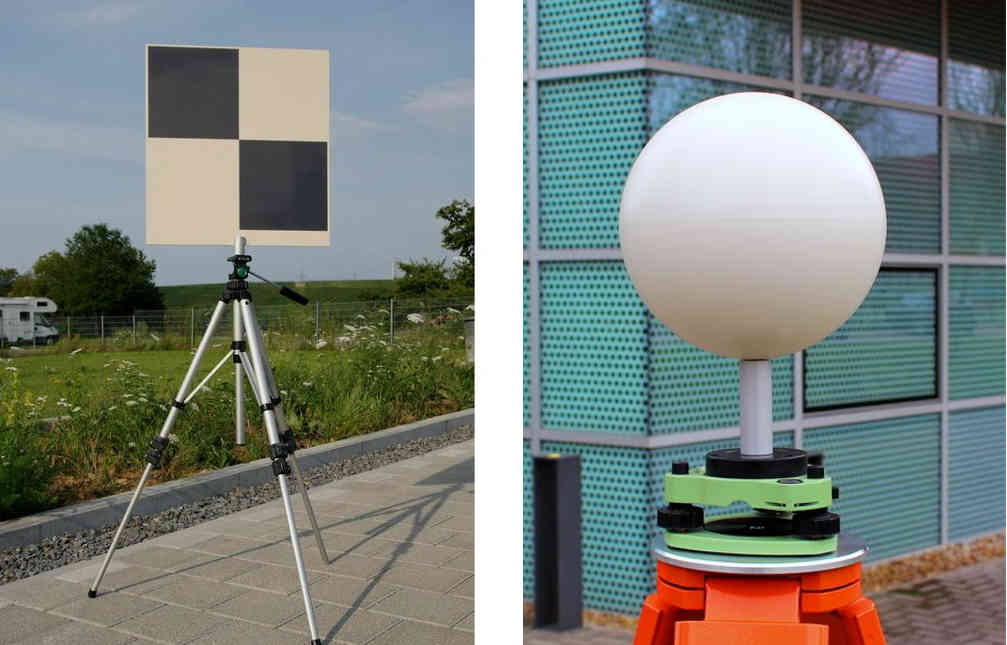
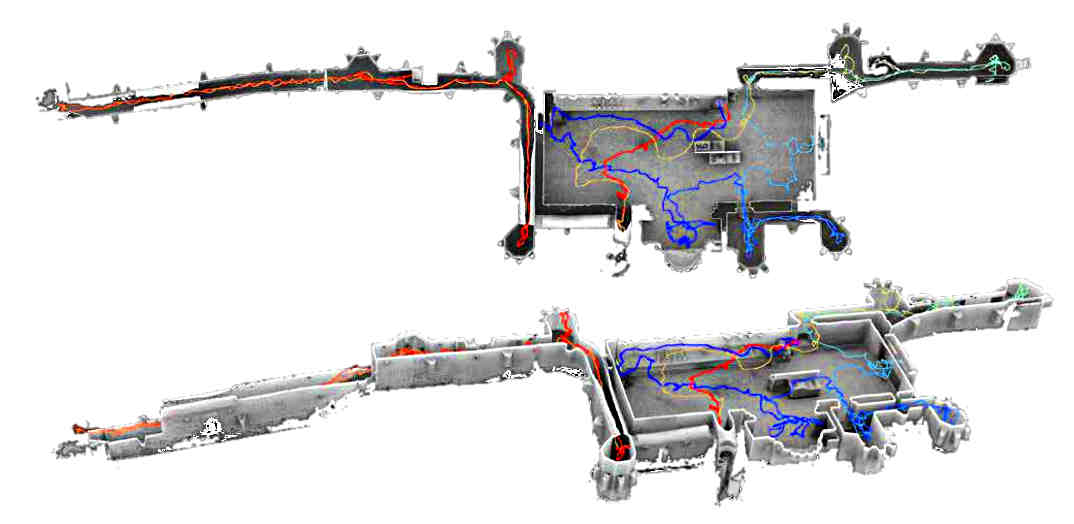
L’ajout de ces points “durs” lors du post-traitement permettra à la fois le géopositionnement du nuage global de points , mais aussi la précision de la correction des déformations apportée au modèle.
Une part importante des appareils de mobile-mapping, notamment de type “backpack”, imposent à l’arpenteur de décrire une boucle parfaite lors de la campagne de captation. L’appareil utilise alors la corrélation d’images pour raccrocher le début et la fin du parcours sur le même point, et corriger les dérives intermédiaires.
En clair : qu'est ce que le SLAM ?
Comme vous pouvez le constater le SLAM n’est pas une technique de numérisation aussi clairement définie que peuvent l’être le LiDAR et la photogrammétrie : parler de SLAM revient vite à évoquer la combinaison de plusieurs technologies complémentaires, et finalement à parler d’outils plus que de techniques.