
L’étude de la photogrammétrie a conduit à introduire les notions de lasergrammétrie LiDAR, et de scanner laser 3D. Il est désormais temps de préciser ces termes.

Le LiDAR (Light Detection And Ranging) peut se définir comme un système laser émettant une série d’impulsions à très haute fréquence qui sont ensuite réfléchies par la cible atteinte. La distance entre l’émetteur laser et la cible est déterminée par le temps de trajet de l’onde. Généralement, la longueur d’onde utilisée se situe dans le proche infrarouge.
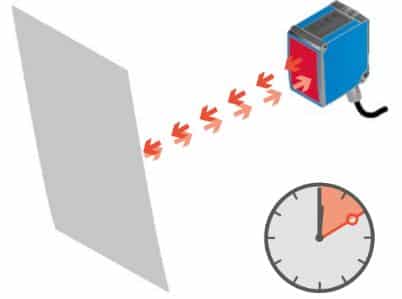
Le LiDAR utilise le principe de télédétection laser par télémétrie. Il envoie une impulsion de lumière et mesure le temps que cette impulsion a mis pour revenir jusqu’au récepteur. En connaissant la vitesse de la lumière (environ 299 800 km/s), le système peut ainsi calculer la distance qui a été parcourue par la lumière avant de heurter successivement un (ou plusieurs) objet(s) . Seule une infime partie de l’énergie émise a besoin d’être récupérée par le récepteur pour réaliser ces calculs.
Deux familles de LiDAR
Les systèmes LiDAR se décomposent en deux familles reposant sur deux techniques distinctes.
Le terme de “lasergrammétrie” désigne quant à lui la technique qui utilise le rayonnement laser pour balayer une zone directement et rapidement à partir d’une station laser, et génère un nuage de points 3D (X, Y, Z) incluant également une information sur la réflectance, ou taux de réflexion, de chaque point.
[qodef_blockquote text="La “lasergrammétrie” est une technique exploitant la technologie “LiDAR” et reposant sur des outils tels que les “scanners laser 3D”." title_tag="p" width=""]
Ces notions sémantiques sont parfois négligées, et dans le monde professionnel, ces termes se téléscopent et sont employés simultanément pour désigner la même méthode de numérisation.
Qu'est ce qu'un scanner laser 3D ?
Un scanner laser 3D est un matériel de télémétrie dont le fonctionnement est basé sur l’émission d’un rayonnement laser avec un faisceau d’émission très étroit.
Un scanner laser 3D se compose :
- d’un système laser chargé d’émettre une onde lumineuse,
- d’un télescope qui récoltera l’onde retour,
- d’une chaîne de traitement qui quantifie le signal reçu.

Le but du scanner-laser 3D est de chronométrer le temps mis par une impulsion laser pour partir du scanner et en revenir après rebond sur l’objet visé.
LiDAR multi échos
Certains scanners laser ont des capacités que l’on nomme couramment “multi-écho”.
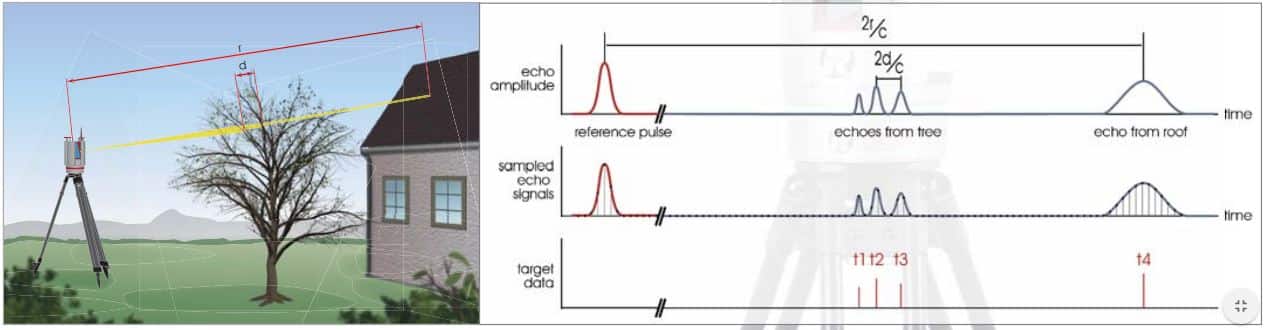
Les impulsions laser émises par un système LiDAR se réverbèrent sur les différentes surfaces : végétation, constructions, peintures, etc. Une impulsion laser envoyée est capable de revenir sur le capteur suite à plusieurs retours que l’on appelle alors échos. Ainsi, toute impulsion laser émise qui rencontre de multiples surfaces de réflexion lorsqu’elle se déplace, est divisée en autant d’échos qu’il y a de surfaces réfléchissantes.
Pour le comprendre, il faut distinguer l’onde émise de l’onde réfléchie.
- Les caractéristiques de l’onde émise sont reliées au type de système laser et à la qualité de la lumière laser utilisée.
- Les caractéristiques de l’onde réfléchie quant à elle sont dépendantes par nature de la cible réfléchissante.
L’analyse de la différence entre le profil de l’onde émise et celui de l’onde réfléchie permet d’obtenir des informations sur la nature de l’objet scanné.
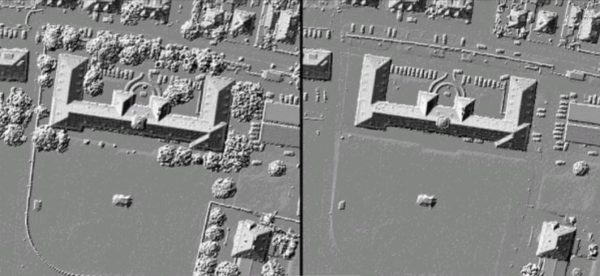
[qodef_blockquote text="Ainsi, dans le cadre d’une captation par LiDAR aéroportée au-dessus d’une forêt, le dernier écho sera considéré comme le terrain (définissant donc un point du MNT, Modèle Numérique de Terrain) alors que les autres échos seront affectés à la végétation." title_tag="p" width=""]
En effet, certaines parties du signal laser seront réfléchies par des feuilles ou par des branches, alors que d’autres parties passeront à travers le feuillage par l’intermédiaire de petits espaces et atteindront le sol avant d’être réfléchies. En raison des retours multiples de faisceau, plusieurs échos peuvent être enregistrés, permettant la discrimination des objets. Lors de l’exploitation d’un nuage de points, cette segmentation des points permet la catégorisation nécessaire à tout travail d’analyse.
[qodef_blockquote text="Tous les scanners laser 3D ne permettent pas la gestion de multi-échos." title_tag="p" width=""]
Cette capacité a été rendue disponible commercialement en 2004 avec l’arrivée sur le marché du scanner Riegl QMS 560 destiné à des applications aéroportées. La technologie s’est ensuite étendue aux scanners terrestres. Le principe repose sur la capacité à analyser les formes d'onde des différents échos pour définir la position des différents points d’impact.
Toute impulsion lumineuse va, par définition, renvoyer un écho similaire, que l’on parle de scanner “à temps de vol” ou “à déphasage”. Dans l’absolu, il s’avère donc que la capacité permettant de récupérer plusieurs échos et d’en déduire des positions d’objets dans l’espace ne relève pas de la technologie LiDAR employée mais des capacités de traitement et d’analyse des données conférées par les fabricants de scanners laser 3D à leurs matériels. Toutefois, la technologie en elle-même rend plus complexe la gestion de plusieurs échos dans le cas de LiDAR à déphasage.
[qodef_blockquote text="Les scanners laser dits multiéchos sont donc la plupart du temps des LiDAR à temps de vol. " title_tag="p" width=""]
Pour être capable de distinguer plusieurs échos, la distance entre ces derniers doit être au moins égale à la moitié de la longueur d’onde. Par exemple, avec une longueur d’onde de 8 nanosecondes, la distance entre deux échos (donc deux objets sur le même axe) devra être supérieure à 120 centimètres (en détail, ce résultat est égal à la largeur d’onde multipliée par la vitesse de la lumière divisée par la réfractivité).

La mesure LiDAR par “temps de vol” reposant sur l’émission d’une seule impulsion, les signaux retours correspondants aux différents échos sont nativement plus contrastés que dans le cas des LiDAR par déphasage, qui eux émettent en continu des impulsions à fréquences variables. La multiplicité des signaux crée ainsi d’autant plus de retours ayant pour effet de polluer la réponse par des échos parasites, rendant l'interprétation plus complexe et présentant de fait le risque d’en réduire la fiabilité.
Faut-il choisir un scanner laser 3D multi-echo ou simple écho ?
La gestion de données multiéchos présente de nombreux atouts quant à la fiabilisation et la classification des données recueillies, qui deviennent rapidement un défaut non négligeable au regard d’autres critères :
- Les données collectées sont beaucoup plus lourdes (plusieurs échos = plusieurs points associés à chaque impulsion). De manière simplifiée, on peut considérer qu’un LiDAR 5 échos produira des données dont le volume sera multiplié d’autant comparé à un LiDAR simple écho. Nous verrons, dans un autre article, que le volume des données constitue un enjeu considérable pour le secteur de la capture de réalité 3D.
- Le temps d'acquisition est généralement plus long. Dans le cas de campagnes de scan de grande envergure, les coûts humains associés peuvent croître significativement.
- De nombreuses scènes ne nécessitent pas de multiéchos. Si l’intérêt est évident dans le cas d’une forêt, ça l’est beaucoup moins en l’absence avérée de végétation par exemple, si vous scannez l’intérieur d’un immeuble.
Le choix d’un matériel reposant sur l’une ou l’autre des technologies doit donc se faire après égale considération de l’ensemble de ces points.
Limites de la technologie
Les conditions climatiques
La lasergrammétrie présente des atouts face à la photogrammétrie.
[qodef_blockquote text="Les mesures LiDAR peuvent être réalisées dans des conditions météorologiques telles que la pluie, le brouillard ou la neige contrairement à la photogrammétrie." title_tag="p" width=""]
Toutefois, bien que la technologie permette de passer outre ces désagréments climatiques, il reste important de noter que les impulsions LASER peuvent être réfléchies sur les flocons de neige, ou déviées par diffraction lorsqu’elles parviennent à traverser les gouttes de pluie, conduisant généralement à un triple phénomène :
- d’absence des données obstruées,
- de pollution du nuage par des points parasites dans l’atmosphère de la scène,
- de bruit accru sur les surfaces, lié à la perte de précision causée par la diffraction.

Les scanners laser 3D reposant sur des LiDAR par temps de vol seront donc plutôt concurrentiels face à leurs antagonistes plus rapides “à déphasage”.

Les surfaces brillantes
Les surfaces réfléchissantes posent également un problème pour les mêmes raisons que celles relatives à la photogrammétrie. Toutefois, l’avantage du LASER réside dans la concentration de son faisceau sur un seul point, ce qui conduit à limiter les phénomènes de réflexion diffuse, et permet généralement d’obtenir des résultats légèrement meilleurs qu’avec la photogrammétrie sur certaines surfaces semi-réfléchissantes telles que des gaines techniques métalliques.
Sur l’eau également les données ne vont pas être pertinentes, puisque le faisceau de lumière va subir une diffraction causant une déviation de signal, et une interprétation erronée de la distance séparant le scanner laser du point impacté.


LiDAR en station fixe ou mobile
Une dernière limite est inhérente même au principe du LiDAR, à savoir la télémétrie par distance entre l’origine du faisceau laser et un point impacté.
[qodef_blockquote text="Afin que l’environnement soit mesuré de manière uniforme, il est absolument nécessaire que l'origine du scanner soit immobile, afin que sa position puisse être déterminée avec certitude." title_tag="p" width=""]
S’il s’avère simple d’utiliser un scanner laser 3D terrestre, de telles conditions sont impossible à obtenir avec des LiDAR mobiles, qu’ils soient aéroportés par drone ou avion, véhiculés par une voiture, un humain revêtu d’un sac à dos, ou même par un robot. Dans de telles circonstances, le capteur LiDAR est en mouvement permanent.
Le seul moyen d'interpréter les données obtenues est donc de définir le mouvement en question. Les matériels de “mobile mapping” sont ainsi équipés de plusieurs capteurs de géopositionnement, ainsi que de centrales inertielles ayant pour fonction de retracer la trajectoire horodatée de l’appareil afin de définir une origine, mobile celle-ci, à chacun des points. Si cette méthode est pertinente en termes de concept, son application conduit invariablement à une augmentation du “bruit”.
Ainsi, une paroi ne sera pas représentée par une seule série de points coplanaires, mais par une tranche de points de densité variable assez similaire à une galaxie vue latéralement.

[qodef_blockquote text="L'interprétation algorithmique de ces données permet de détecter les zones les plus denses et de réduire le bruit, mais cela relève soit de la modification soit de la suppression de données, ce qui pose un problème de cohérence avec le principe même de capture de réalité 3D." title_tag="p" width=""]
Nous reparlerons du sujet du mobile-mapping dans d’autres sections.
LiDAR multi-spectral et hyper-spectral
Certains environnements très denses comme les forêts équatoriales (du fait de l’épaisseur de la couche végétale) peuvent représenter une barrière infranchissable, y compris pour les LiDAR multiéchos. Les capteurs “multispectraux” et “hyperspectraux” s’avéreront alors utiles.
Nous avons vu que la collecte d’informations par LiDAR ou photogrammétrie n’est qu’une réponse partielle au regard de la finalité des données, leur caractérisation constituant un enjeu important.
[qodef_blockquote text="Les techniques d’échos multiples peuvent constituer un premier niveau de réponse permettant de segmenter les données en différentes couches. Toutefois l’information renvoyée concerne uniquement la position des points multiples impactés, mais ne contient aucune indication sur leur nature." title_tag="p" width=""]
Une réponse à cette problématique consiste à combiner plusieurs signaux de longueurs d’onde différentes.
[qodef_blockquote text="Le principe est que chaque longueur d’onde sera renvoyée de manière différente en fonction de la nature du point impacté." title_tag="p" width=""]
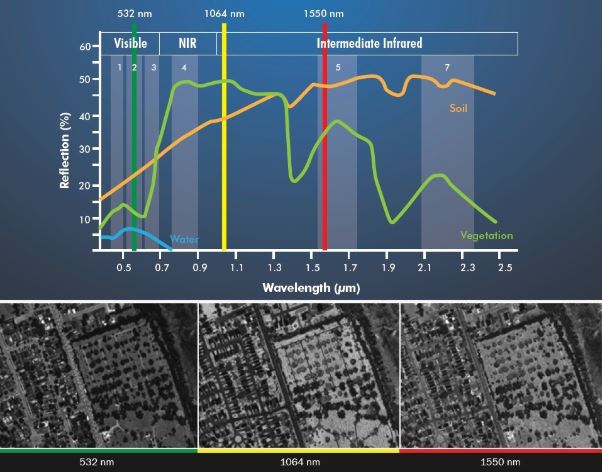
Pour le comprendre, prenons l’exemple d’une forêt. La chlorophylle présente dans les feuilles absorbe fortement les segments bleus et rouges présents dans la lumière blanche solaire. La conséquence est donc une réflexion du segment central du spectre lumineux, à savoir les teintes de vert.
A l’automne, la chlorophylle disparaît progressivement et l’aspect des feuilles est modifié. Cette nouvelle teinte présentant de nouvelles caractéristiques de réflectivité sur certaines longueurs d’onde. De la même manière, une étendue d’eau, une route, ou un tapis végétal, n’auront pas la même réponse aux différentes longueurs d’onde envoyées, permettant ainsi, après analyse informatique, de catégoriser les points par nature.

La terminologie distingue généralement “multispectral”, “superspectral” et “hyperspectral”. Les deux premiers termes désignent tous deux l’emploi de plusieurs bandes assez larges de longueurs d’onde, généralement de trois à cinq, fortement espacées. La méthode hyperspectrale, pour sa part, fait appel à un nombre bien plus important de bandes de longueurs d’onde, beaucoup plus fines, envoyant donc des informations plus détaillées de la signature spectrale des points impactés.
Qu’elle soit multi/super/hyperpectrale, la spectro-imagerie permet de reconnaître dans les points visés la « signature spectrale » des constituants qu’elle contient, donc de les identifier. La position en longueur d’onde des pics d’absorption spécifiques dépend de leur composition chimique. Leur amplitude va quant à elle, donner des indications sur la quantité (ou la concentration) des constituants présents. Enfin, la forme générale du spectre (ou continuum) dépend des propriétés physiques de la surface (granulométrie, rugosité, humidité, etc.).
Cartographie et Systèmes d'Information Géographique (SIG)
A l’heure actuelle, ces principes s’appliquent essentiellement dans le domaine de la cartographie à grande échelle et des SIG (Systèmes d’Information Géographique).
Comme toute technologie, le LiDAR multispectral s’attaque aux marchés représentant les enjeux les plus importants : classifier manuellement des images aériennes à l’échelle de territoires entiers représente un coût humain tellement important, que les investissements en recherche et développement sont massifs pour trouver des solutions automatisées. Pour l’heure, les applications à l’échelle plus réduite d’un bâtiment ou d’une parcelle sont moins nombreuses et se heurtent à la question de la rentabilité des investissements.
[qodef_blockquote text="Les années passent et permettent la démocratisation des techniques d’imagerie pour l’heure encore confidentielles. " title_tag="p" width=""]
De fait, il est important de considérer l’activité de numérisation 3D comme ce qu’elle est réellement : une branche étroite du domaine de l’imagerie.
D'autres technologies à venir
Lorsque nous parlons de “scanner” un bâtiment, gardons toujours en tête que ce terme est emprunté au domaine médical qui, au fil des années, a réussi à découvrir de plus en plus de techniques d’imagerie permettant désormais de voir l’invisible.
Tout comme numériser l’enveloppe extérieure d’un corps humain à l’aide d’un laser ou de photographies a une portée limitée médicalement parlant, considérer le LiDAR et la photogrammétrie (qui se limitent aux informations visibles à l’oeil nu, donc nullement à l’intérieur des objets) comme les seules technologies de numérisation employables sur nos projets de construction ou d’aménagement revient à fermer les yeux sur les évolutions à venir.
Gardons une grande ouverture d’esprit, utilisons les technologies disponibles actuellement, mais jetons régulièrement un œil sur les autres champs d’application du domaine de l’imagerie pour nourrir notre imagination et créer les innovations de demain.
Bel article. Merci à vous.
Merci à vous d’avoir pris le temps de nous donner votre avis !
Bien à vous.
Super très intéressant! bravo
Merci beaucoup !
A bientôt
j’ai beaucoup apris avec cet article. J’espère qu’il y en aura d’autres comme celui-ci. Cela nous aide également à faire des choix et à prendre des décisions en terme d’achat. Bravo.
Merci pour votre commentaire. De nombreux autres articles sont prévus.
Pour aller beaucoup plus loin dès maintenant, je vous invite à vous procurer le livre Numérisation 3D & Construction : https://btp.digital/livre/numerisation-3d-construction/
Cordialement.
Ce Clément Valente m’a l’air quelqu’un de très bien. Il est passionné par ce qu’il fait et cela transpire à travers ces articles (ou de l’équipe). Bravo. Continuez ainsi – Olivier RESSY Ceo Axxess Data –
Merci Olivier. Bonne continuation.
merci pour le cours ou l’exposé. c’était très édifiant pour moi qui suit géomaticienne
Merci pour ces informations. Je travaille à la gendarmerie nationale, plus précisément à l’IRCGN de PONTOISE. Nous utilisons les lasers que nous appliquons à la criminalistique. Quelle belle technique. A bientôt.