Vous connaissez et comprenez désormais les différents principes de numérisation, leurs fonctionnement intrinsèque, et êtes en mesure d’identifier leurs forces et leurs faiblesses.
Capturer la réalité dans toute sa complexité, c’est s'adapter à des conditions toujours nouvelles, avoir plusieurs outils à sa disposition, et surtout savoir lequel choisir.
[qodef_blockquote text="Parmi les outils phares de la numérisation 3D on ne manquera pas de citer en premier lieu le scanner laser 3D." title_tag="p" width=""]
Scanner laser 3D en station fixe
L’évocation de la numérisation appliquée à la construction renvoie généralement très rapidement au terme de “laser-scanning” au point que les entreprises prestataires dans le domaine se disputent à prix d’or ce terme dans leurs campagnes publicitaires.
Pourtant, comme vous le savez désormais, le LiDAR terrestre qui se cache derrière la dénomination de “scanner laser 3D” n’est qu’une technique de numérisation parmi d’autres. Comprendre cet engouement autour de ces outils plutôt que d’autres requiert des les étudier en détail.

Installation
Un scanner laser 3D est d’apparence comparable à d’autres types d’instruments de télémesure habituellement utilisés par les géomètres, telles les stations totales.

Les scanners laser 3D en station fixe doivent, comme leur nom l’indique, rester immobiles le temps de la capture. Couramment, un trépied sera utilisé comme support, toutefois certaines configurations peuvent amener à utiliser d’autres types de supports.
Lorsqu’une visibilité plus longue est attendue - en restant dans la limite des capacités du scanner, variable selon le modèle - on pourra par exemple utiliser des perches de grande hauteur équipées en tête d’une base stabilisatrice

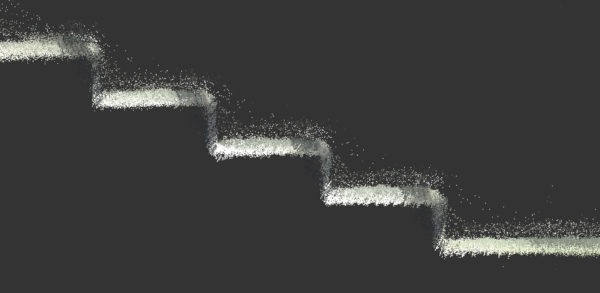
La stabilisation en tête a pour objectif de pallier aux éventuelles oscillations dues au vent, ou à la rotation du scanner laser autour de son axe qui, sous l’effet de la hauteur importante du support, ont tendance à détériorer la qualité du nuage de points généralement traduit par un aspect de vaguelettes sur les surfaces planes.
Tout type de support peut être envisagé, dès lors que la stabilité du scanner est assurée lors de la captation, à défaut de quoi, on devra parler de mobile-mapping et adjoindre des capteurs corrigeant les mouvements induits lors de la mesure.
Composition d'un scanner laser 3D
Un scanner laser 3D se compose de plusieurs éléments. Le premier est sa base rotative motorisée qui permet au scanner laser de décrire une rotation sur le même plan que le support, lequel est généralement horizontal, mais peut se trouver volontairement incliné lorsque les conditions de captations le nécessitent.

Au-dessus de cette base rotative repose le bloc principal du scanner laser 3D qui comprend d’une part les éléments informatiques, et d’autre part, les capteurs nécessaires aux calculs du nuage de points.

Le fonctionnement intrinsèque de ces éléments n’ayant qu’une utilité limitée dans le cadre de nos apprentissages, nous ne les détaillerons pas ici.
La seconde partie du bloc principal est composée d’un miroir rotatif orienté à 45 degrés, servant de surface de réflexion au signal laser du LiDAR et le projetant de manière circulaire sur un plan orthogonal au plan de rotation de la base.
Les rotations combinées de la base et du miroir projettent ainsi le laser dans toutes les directions, le scanner se trouvant alors au centre d’une sorte de sphère de projection du LiDAR.
De cette façon, et au terme de la rotation, le scanner finit par avoir illuminé de son laser tous les objets visibles depuis sa position, de manière analogue à une ampoule éclairant une pièce plongée dans l’obscurité.

La plupart des scanners laser 3D sont équipés d’un appareil photo interne se situant à l’intérieur du bloc principal et venant se substituer à l'émetteur laser au terme de la captation LiDAR.
A nouveau grâce à la réflexion de l’image sur le miroir rotatif, qui ne tourne plus en continu cette fois- ci, mais de manière saccadée, l’image enregistrée par le capteur photo possède exactement la même origine que le nuage de points.
Les images ayant pour finalité de créer des bulles 360°, mais également de coloriser le nuage de points, garantir la même origine de prise de vue pour le LiDAR et les photographies est extrêmement important.

Certains fabricants de scanners laser 3D n’ont toutefois pas souhaité intégrer de capteur photo interne, en prévoyant la possibilité pour l’utilisateur de placer un capteur reflex de son choix sur le dessus du scanner. Certes, cela conduit à une incohérence entre la position des points et leur colorisation, mais cette dernière devient négligeable au-delà d’une distance d’une dizaine de mètres, le gros avantage de ce choix étant la possibilité d’embarquer l’appareil photo de son choix, ce qui peut considérablement améliorer la qualité des photos, et de ce fait la colorisation du nuage de points.
Fonctionnement d'un scanner laser 3D
L’utilisation d’un scanner laser 3D est très simple, ce qui explique en partie la prédominance de cette terminologie dans les recherches web gravitant autour de la capture de réalité et de numérisation 3D de l’existant.
Pour mener une campagne de scan, il suffit d’un opérateur muni de son scanner et d’un trépied. L’arpenteur a pour mission d’analyser l’espace à numériser et de détecter les positions les plus adéquates pour lancer les scans, capacité qui s’acquiert au fur et à mesure des campagnes et du travail d’assemblage qui en découle.
Placer le scanner aux endroits stratégiques permet de réduire le nombre de stations, tout en maintenant un niveau de recouvrement suffisant entre elles , afin que l’assemblage des scans en un scan unifié puisse être réalisé facilement par la suite, c’est la partie la plus complexe sur travail.

Une autre responsabilité de l’arpenteur est de choisir les bons réglages pour chaque station de scan. En effet, numériser une chambre (surfaces mates, espaces restreints) ne requiert pas la même configuration que pour scanner un hangar industriel (surfaces métalliques réfléchissantes, grands espaces). Les scanners laser permettent de modifier certains paramètres de numérisation, prenons ici l’exemple d’un scanner FARO Focus 3D :

L’arpenteur peut modifier la résolution du scanner, cette dernière ayant la même définition que pour un appareil photo à savoir le nombre de points dans un espace donné.
Sur ce scanner, la résolution est exprimée par la distance entre deux points situés à 10m du scanner ce qui permet à l’utilisateur d’avoir une visibilité directe sur la qualité finale de son scan. Pour une scène de grande envergure, la résolution devra donc être réglée sur une valeur haute : les impulsions laser seront émises avec un pas réduit et donc en nombre plus élevé, réduisant de ce fait la cadence de numérisation.
Un second réglage sur ce modèle FARO porte sur la “qualité” du scan exprimée par un facteur allant de “2x” à “6x”. Cette échelle n’est que peu explicite et ne permet pas directement de comprendre sur quoi ce réglage intervient, la seule indication donnée par la notice étant que qu’il “réduit le bruit dans les données de scanning” et que “la qualité du scanning s’en trouve améliorée et le temps de numérisation est plus long”.
Intrinsèquement, ce paramètre indique le nombre de mesures d’un même point afin de retenir une valeur moyenne des mesures réalisées, ayant pour effet de comprimer le bruit et ainsi d’améliorer la qualité.
Lorsque les conditions atmosphériques ne sont pas au beau fixe (en cas de pluie légère par exemple) ce paramètre peut aider à réduire le bruit. Il sera également intéressant d’augmenter la valeur de ce paramètre pour certaines surfaces.
Prenons pour exemple un espace végétal : le mouvement de la végétation, l’effet du vent peuvent conduire à une augmentation du bruit, lequel sera lissé par une augmentation du nombre de mesures du même point.
La numérisation de certaines surfaces métalliques tel que l'aluminium brossé ou le chrome peuvent renvoyer des mesures aberrantes, lesquelles peuvent être améliorées en intervenant sur ce paramètre de qualité.
Notons toutefois que l’opacification de la surface réfléchissante restera la solution la plus efficace (il existe des sprays opacifiants dans le commerce) mais ne permettra plus alors de considérer la campagne de numérisation comme “non intrusive” ou “non destructrice”, ce qui sera tout bonnement impossible pour certaines scènes.
Selon les marques de scanner laser 3D, l’accès à certains paramètres n’est parfois pas prévu et les noms données sont trop variables pour en dresser une liste exhaustive. Généralement, ceux-ci portent sur l’activation ou non de capteurs tels que l’inclinomètre ou le GPS ou de certaines capacités comme l'auto-registration (assemblage des scans sur le terrain).
Une fois les réglages effectués, l’utilisateur n’a plus alors qu’à déplacer le scanner, régler la hauteur du trépied, le positionner approximativement à l’horizontale - le scanner détecte et corrige la planéité des mesures - et lancer la procédure de scan. Le fonctionnement est donc extrêmement simple !
Procédure de numérisation
Comme vous pouvez le comprendre, utiliser un scanner laser 3D sur le terrain n’est absolument pas compliqué. Si vous ou votre entreprise êtes en train d’hésiter entre acheter un scanner ou payer un prestataire de scan, repoussez votre décision pour l’instant, car la partie “terrain” n’est finalement que le segment le plus simple du travail, et ne saurait donner une image réaliste de la complexité globale de la chaîne de production d’un nuage de points.
En effet, la première étape consiste à réaliser autant de scans que nécessaire sur le terrain, lesquels prennent à ce stade la forme de nuages de points isolés et totalement dissociés. Selon la taille et l’agencement du site numérisé, la rigueur accordée à la structuration de la mission et la nomenclature des scans sera d’une grande aide pour la suite.
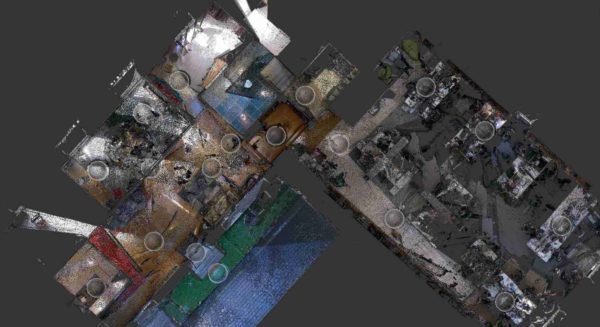
De retour au bureau, vous devrez alors récupérer les données, généralement via une clé USB ou une carte SD selon l’appareil utilisé, et les copier sur l’ordinateur servant à l’assemblage des scans. Ce dernier va procéder à la comparaison des nuages de points, et essayer de les assembler sur la base de données communes (murs, escaliers, sols ou tout autre objet en commun entre deux scans par exemple).
Il s’agit ici d’assembler uniquement les pièces du puzzle. Certains logiciels permettent d’assembler automatiquement les scans et n’ont besoin de l’intervention d’un humain qu’en cas de recouvrement insuffisant entre des stations, alors que d’autres logiciels nécessitent un travail intégralement humain.
Une fois l’assemblage réalisé, un nuage de points “unifié” est produit et servira alors de “livrable” de la campagne de scan, dont nous détaillerons les possibilités d’exploitation par la suite.
Ce workflow habituel se trouve toutefois totalement modifié depuis l’arrivée de scanners laser capables de se repérer dans l’espace au cours de la numérisation grâce notamment à l'intégration de centrales inertielles, et de déduire des positions relatives de chaque station de scan.
De cette façon, un pré-positionnement des stations est acquis sans aucun post-traitement, et le temps d’assemblage des scans s’en trouve considérablement réduit. Cette capacité à supprimer au maximum le temps humain du processus, revêt un caractère stratégique considérable pour les fabricants compte-tenu des temps actuels de post-traitement.
Temps d’acquisition
Toujours dans l’objectif d’avoir une vision globale des différentes solutions de numérisation, il est utile d’avoir en tête certains ordres de grandeur du temps humain associé à la numérisation laser.
Selon les paramètres de qualité des scans, et notamment l’activation ou non de la prise de photos - lorsque les photos sont désactivées, la colorisation des scans ne pourra être donnée que sur la base du champ scalaire relatif à la réflectance - le temps de scan peut varier de 1 minute à plus d’une trentaine de minutes.

[qodef_blockquote text="Pour des applications sans activation de la couleur en intérieur de bâtiment, considérer un temps de 2 à 6 minutes par scan incluant le déplacement vers la station suivante et les aléas éventuels, est une base cohérente." title_tag="p" width=""]
La numérisation d’espaces extérieurs devra être évaluée sur une base de 5 à 10 minutes par scan noir et blanc. Le temps associé à la prise de vue photographiques et donc à la colorisation du nuage n’est ici pas pris en compte car la vélocité des appareils est trop variable sur ces points pour en dégager une valeur moyenne.
[qodef_blockquote text="Ces données ne concernent que le volet “terrain” de la mission de numérisation, auquel il est indispensable d’ajouter le temps d’assemblage, de nettoyage et d’optimisation des nuages de points." title_tag="p" width=""]
Pour ce travail de post-traitement réalisé au bureau, il conviendra de considérer une durée équivalente à la durée de scan sur site, ce qui signifie que chaque jour de scan sur le terrain amènera un jour de travail informatique a posteriori.
[qodef_blockquote text="Si vous vous posiez la question d’acheter un scanner, vous devez impérativement anticiper ce temps humain." title_tag="p" width=""]
C’est sur ce point crucial que les nouvelles générations de scanners laser 3D capables de procéder à une registration automatique sur le terrain révolutionnent le processus de numérisation. Ces nouveaux appareils permettent en effet de réduire considérablement le temps de post-traitement notamment concernant l’assemblage des scans.
Prix d'un scanner laser 3D
Les scanners laser 3D d’entrée de gamme sont généralement vendus entre quinze et trente mille euros.
A ce niveau de prix, actuellement, on ne trouvera pas d’appareils proposant la gestion de plusieurs échos, ni de distances suffisantes de captation pour de vastes projets extérieurs, les applications restent donc typiquement limitées à la numérisation intérieure de bâtiments.
Pour numériser de grands espaces, notamment extérieurs, et bénéficier des données plus exploitables à des fins d’ingénierie avancée, la facture tournera souvent entre quarante et soixante-dix mille euros.
Entre ces deux niveaux de prix extrêmes, vous trouverez toute une gamme de produits se démarquant sur certaines caractéristiques techniques, destinée à des franges de marchés distincts.
Conclusion
Les scanners laser 3D sont des outils faciles à prendre en main. Ils permettent de révolutionner les techniques de mesures dans la construction. Le montant d'investissement étant encore élevé, il reste toutefois essentiel d'avoir une vision claire et en amont sur la méthode d'utilisation de ces matériels.
Et vous, que pensez-vous des scanners laser 3D ?
Bonjour,
Article intéressant, petite question, la perche que vous présentez qui permet de suspendre le Faro est elle industrialisée par Faro ?
En vous remerciant
Bonjour,
A ma connaissance non, mais il est possible que cela ait évolué.
Cordialement.
Bonjour,
J’ai un projet pour réaliser une installation lumineuse à base de fibres optiques.
Je souhaiterai trouver une personne qui pourrait traiter le résultat d’un Scan 3D d’une sculpture et de réinterpréter le nuage de points en 2D sur une surface plane. Le processus de photogrammétrie est en cours.
Mais je ne connais personne qui pourrait retranscrire ce résultat en 2D .
Il serait plus simple de le dire par téléphone.
Cordialement
Jérôme C.