











Les faces ainsi créées n’apportent, en tant que telles, aucune information spatiale supplémentaire comparé au nuage de points. De manière simplifiée, les informations contenues dans un “mesh” (non texturé) ou un nuage de points de la même scène sont les mêmes : il s’agit des coordonnées de chaque sommet. C’est essentiellement l’interprétation algorithmique qui en est faite qui va différer.
[qodef_blockquote text="Alors que le nuage de points préservera le vide entre trois sommets et permettra de voir au travers, le “mesh” contiendra une face triangulaire masquant ce qui se trouve à l’arrière plan." title_tag="p" width=""]

L’intérêt essentiel d’un “mesh”, en comparaison d’un nuage de points, réside donc, en la présence de ces faces triangulaires assemblées. Ces dernières forment une surface sur laquelle appliquer une texture. De la même manière que vous pouvez coller du papier-peint entre les 4 extrémités qui définissent un pan de mur, vous pouvez ajouter des informations relatives à l’aspect d’une surface en “drapant” une texture photographique sur chacune des faces triangulaires du “mesh”.
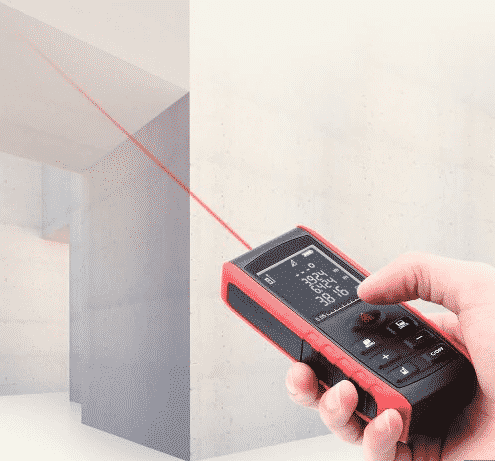
En ce sens, et grâce aux photographies employées au cours d’une reconstruction photogrammétrique, le “mesh” permet de créer des captures 3D bien plus réalistes qu’un simple nuage de points, dont la résolution est définie par la distance entre les points d’impact du laser.
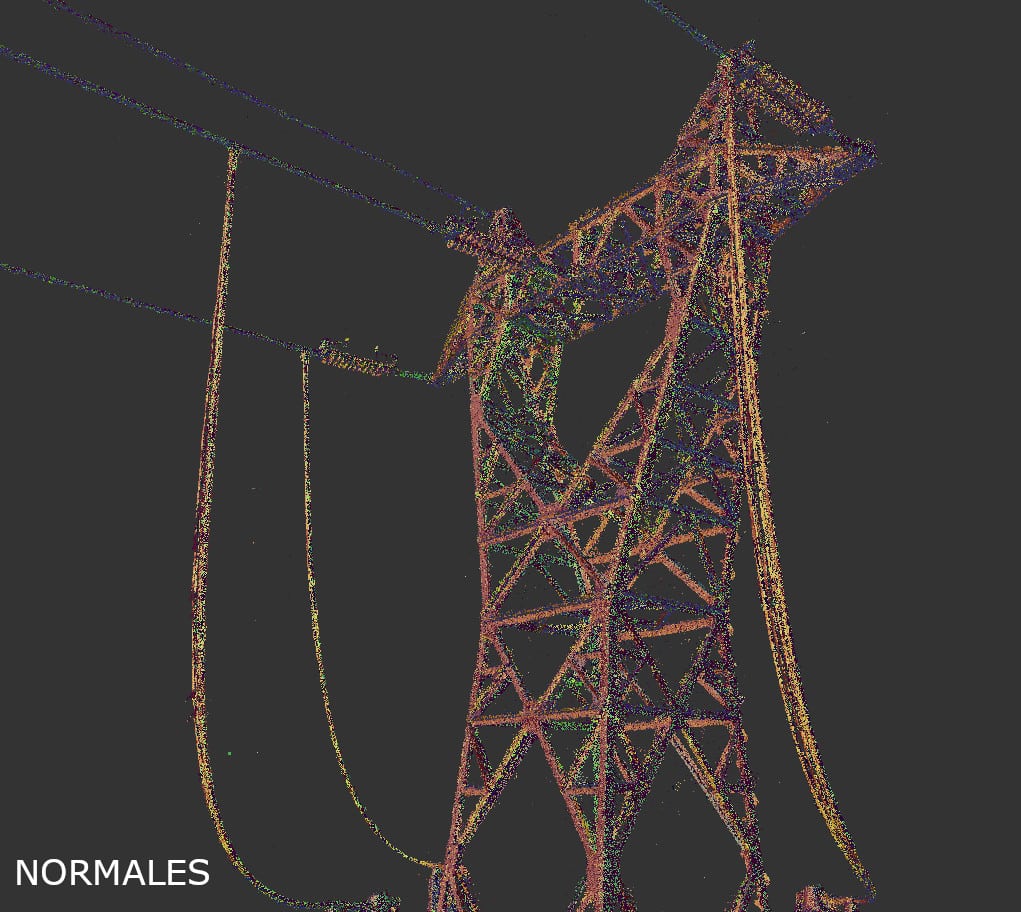
Texturer un “mesh” après une numérisation par scanner laser 3D est plus complexe et implique de recréer des faces 3D entre les points. Ce travail, qui peut sembler simple, nécessite tout de même, dans le cas de données LiDAR, un nettoyage préalable des éléments parasites (objets en mouvement), une atténuation des bruits de surface afin de rendre les points interprétables par l'algorithme destiné à créer les faces 3D, et un calcul complexe des “normales” associées à chaque point (vecteur perpendiculaire à chaque face).

Un “mesh” texturé à tout pour être plus séduisant et plus facilement interprétable qu’un nuage de points. S’il est facile à obtenir dans le cadre d’une captation photogrammétrique, il l’est beaucoup moins dans le cadre d’une numérisation laser 3D du fait du retraitement informatique nécessaire.
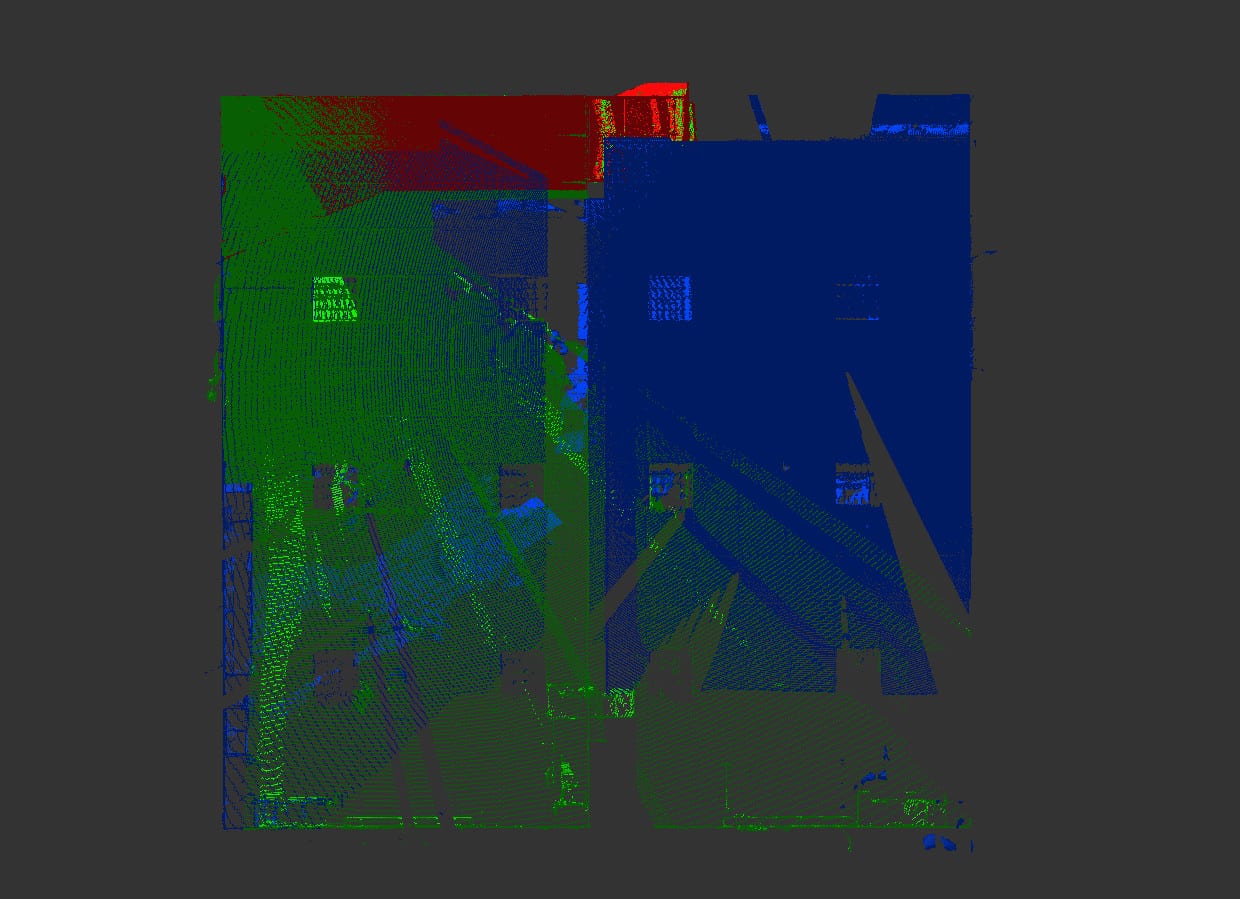
Les évolutions technologiques récentes permettent désormais de combiner lasergrammétrie et photogrammétrie dans le même traitement. Ceci permet de bénéficier de la précision du LiDAR tout en conservant la qualité visuelle d’un mesh obtenu par photogrammétrie.
Nous verrons prochainement comment maîtriser toutes ces techniques 😉.
Bonjour, vos documentations sont très intéressantes, est t’il possible d’avoir des informations sur les produits (logiciels) applicables au BTP ?
Bonjour,
Merci pour votre commentaire. Nos prochains articles détailleront effectivement de manière très opérationnelle les outils de numérisation 3D utilisables dans le BTP. Pour comprendre ce domaine il est toutefois de maîtriser au préalable certaines notions théoriques afin de comprendre les mécanismes. Nous souhaitons que vous ayez toutes les cartes en main pour intégrer efficacement la numérisation 3D dans votre quotidien !
Abonnez-vous à nos newsletter, vous serez informé de la parution des prochains articles !