
Les scanners laser 3D fixes sont l'outil phare pour numériser des bâtiments et autres sites en 3D. Ces appareils s'utilisent de manière statique : le scanner 3D est posé sur un trépied, le scan est lancé, puis l'opération est répétée à différents emplacements. Cet article complet détaille les étapes du processus.

[qodef_blockquote text="La position fixe d'un scanner laser 3D apporte un gain certain sur la qualité des données, mais la cadence n'est souvent pas adaptée à des projets de grande ampleur." title_tag="p" width=""]
Les scanners laser 3D en station fixe permettent de numériser des espaces avec fiabilité en combinant plusieurs scans statiques isolés dans un nuage de points assemblé et unifié. Toutefois, les temps de captation et d’assemblage restent lourds à supporter.
[qodef_blockquote text="Parfois, certaines scènes à numériser ne méritent pas un niveau de précision millimétrique." title_tag="p" width=""]
En effet, la finalité n’est parfois pas de produire des plans “tel que construit”, mais uniquement de documenter l’existant. Au stade de l’esquisse, un architecte n’accordera parfois aucune importance aux dimensions inférieures à la dizaine de centimètre.
De la même manière, selon le niveau de maturation d’un projet d’aménagement, mener une campagne de numérisation ne nécessitera pas souvent un haut niveau de précision, et il ne saurait être pertinent d’y consacrer trop de temps et d’argent.
Quels sont les meilleurs appareils pour numériser de manière mobile ?
Nous avons analysé les solutions de numérisation 3D mobile. Il existe 4 familles pertinentes :
1. Mobile-mapping de type backpack (sac à dos)
Les appareils de mobile-mapping de type “backpack” ou “sacs à dos” se positionnent à merveille sur ces marchés nécessitant une faible précision et une grande vélocité de captation.
Composition du matériel
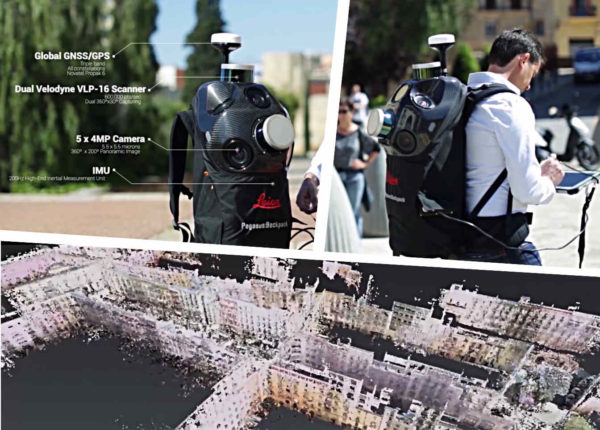
Cette famille d’appareil est destinée à être déplacée à dos d’homme, et prend donc la forme d’un sac à dos intégrant les appareils nécessaires à la numérisation LiDAR en mouvement.
Ce format inclut donc la tête rotative LiDAR telle que celles proposées par la marque Velodyne, diffusant pour la plupart un peigne de 16 à 32 faisceaux. Ce composant est l’organe capable de mesurer les distances et son rôle est essentiel.
Toutefois, compte-tenu du déplacement continu de l’appareil au cours de la mesure, il est indispensable de définir l’origine de chaque point, ce qui explique la présence d’un second composant : la centrale inertielle. Cette dernière est capable de retracer les mouvements de l’arpenteur tout au long de la campagne de scan.
Enfin, afin de permettre des usages tels que la création de bulles photo immersives à 360°, ou même la colorisation des nuages de points, les appareils de type backpack embarquent généralement plusieurs capteurs photos.

Une puce de géopositionnement GPS/Galileo/Glonass vient généralement s’ajouter à la panoplie des composants embarqués dans l’appareil, permettant ainsi de prépositionner le nuage de points dans un système de coordonnées cohérent. Selon les appareils, plusieurs autres composants peuvent venir prolonger la liste dans le but d'améliorer la précision et l’aspect des données collectées.
Principe d'acquisition
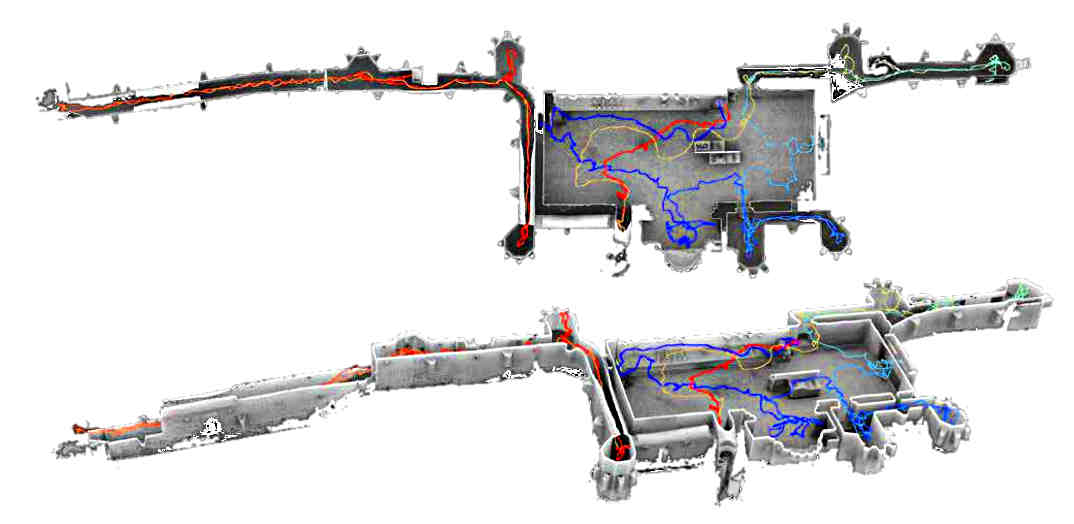
Ce type de scanner mobile prévu pour être embarqué sur un dos d’homme fonctionne comme n’importe quelle autre technologie de mobile-mapping : le scanner découvre l’environnement au fur et à mesure des déplacements de l’opérateur, et en dresse une carte sur le principe du SLAM.
[qodef_blockquote text="Le premier principe de fonctionnement repose donc en l’existence d’un mouvement de l’arpenteur." title_tag="p" width=""]
Dès que le scanner de type backpack a été lancé, la tête LiDAR rotative commence à projeter un ou plusieurs faisceaux laser, et à collecter des coordonnées relatives aux points impactés. Chaque coordonnée est exprimée dans un système de coordonnées sphériques dont l’origine est associée à l’heure exacte de la captation.
Au cours des déplacements, plusieurs dizaines de systèmes de coordonnées sphériques sont générés par seconde, et les données collectées restent dans un premier temps exprimées dans ces systèmes distincts. En parallèle, la centrale inertielle analyse les déplacements de l’opérateur, et permet de déduire la trajectoire suivie par l’arpenteur, en horodatant toujours les données collectées.
Les données LiDAR sont ensuite positionnées par le calculateur embarqué de sorte que l’origine des systèmes de coordonnées sphériques soit positionnée à l’emplacement détecté par la centrale inertielle dans l’intervalle de temps correspondant à la captation. Cet assemblage “à la volée” de nuages de points de faible densité obtenus à haute fréquence, permet de considérer que la captation est réalisée en continu par l’appareil.
[qodef_blockquote text="Une centrale inertielle n’est que peu précise et ne saurait à elle seule assurer la fiabilité de la mesure." title_tag="p" width=""]
Un test simple permettant de le vérifier consiste à marquer un arrêt pendant l’arpentage, et à regarder ce qui se passe à l’écran. Parfois, une dérive est constatée et le backpack semble croire qu’il continue d’avancer.
De nombreuses techniques basées sur la reconnaissance d’image sont généralement intégrées dans le processus d'acquisition afin de corriger ces dérives.
Le seul moyen d'assurer un niveau de précision suffisant reste d’injecter des “points durs” dans le nuage de points. Il s’agit de points pour lesquels des coordonnées précises sont connues et généralement exprimées dans le système de coordonnées défini pour l’opération.
Le placement de cibles ou de sphères de coordonnées connues et facilement identifiables dans le nuage est donc nécessaire en amont de la numérisation.

[qodef_blockquote text="Certains appareils nécessitent que l’opérateur revienne, en fin de captation, à la position initiale exacte afin de “fermer la boucle” et de corriger l’ensemble des dérives par un étirement ou un compactage global du nuage." title_tag="p" width=""]
Si cela semble être un désavantage chronophage lorsqu’on compare les différents matériels, il conviendra d’être alerté que certains backpacks n'exigent pas ce bouclage, afin de vérifier que ce gain de temps ne soit pas associé à une baisse de précision.
Traitement des données
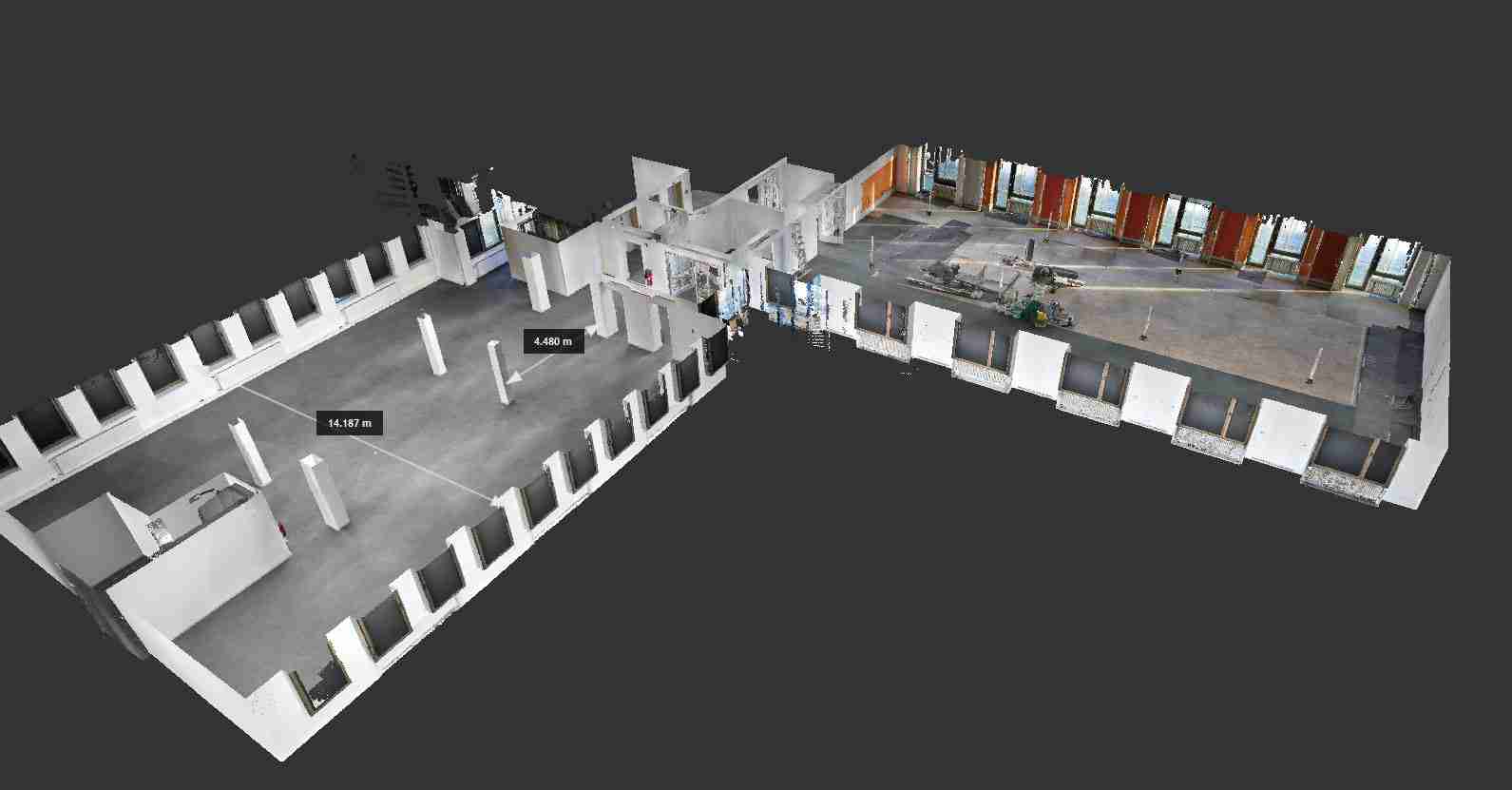
Au terme de la captation sur site, un logiciel fourni par le fabricant du matériel se charge ensuite de l’interprétation des données sur un PC. Bien que les processus soient assez opaques et qu’il n’existe aucune démarche standardisée en la matière, cette phase de post-traitement consiste en l’affinage du nuage de points unifié, exprimé cette fois-ci dans un système cartésien et par un traitement algorithmique visant à réduire le bruit.
En effet, à la différence des scanners laser 3D en station fixe les mesures sont ici faites en mouvement, et il en résulte un bruit important des données se manifestant par le fait que les surfaces planes sont numérisées sous la forme d’une constellation de points de densité croissante à proximité de la position réelle de la surface.
Le traitement des données représente un dilemme assez complexe à résoudre pour les fabricants : faut-il délivrer des données brutes, bruitées et peu exploitables mais ayant l’avantage de ne pas déformer la réalité (dans la limite des capacités de la technologie) ? Ou faut-il procéder à une transformation des données pour réduire le bruit et améliorer la lisibilité des données collectées, au risque de déformer la réalité et de conduire à de potentielles erreurs lors de l’utilisation du nuage de points ?
Plus qu’un choix entre ces deux extrêmes, la difficulté sera de placer le curseur en une position intermédiaire. L’appréciation des utilisateurs étant assez variable en la matière, la meilleure option sera probablement d’offrir plusieurs configurations possibles de la même manière qu’un appareil photo permet de choisir entre plusieurs modes automatiques ou un mode manuel.
Temps d’acquisition
Contrairement aux scanners laser fixes pour lesquels la démarche de numérisation se fait de manière saccadée et nécessite une temps important de post-traitement, la numérisation de type mobile-mapping par backpack est bien plus rapide.
L'arpenteur ne devra pas parcourir le site sans suivre un itinéraire préalablement réfléchi, ni sans adapter sa vitesse de marche, mais cela n'enlève rien à l’avantage indéniable de la technologie qu’est son rendement accru. Ainsi, le temps passé sur le terrain se trouve fortement réduit de même que le temps de post-traitement, les nuages de points sphériques étant assemblés dans un système cartésien en temps réel lors de la captation.
Coût du matériel
Ce type de sac à dos est assez nouveau sur le marché et n’est pas sans présenter d’avantages. Leur haut niveau de rendement leur permet de se destiner à la numérisation d’espaces de grande envergure en réduisant les coûts humains associés, et leur maniabilité permet de numériser des espaces inaccessibles aux véhicules, solution alternative de numérisation mobile.
[qodef_blockquote text="Le niveau de bruit généralement constaté sur les surfaces leur barre toutefois la porte aux scènes nécessitant une numérisation de haute précision." title_tag="p" width=""]
Il en découle un positionnement sur le marché assez évident : la numérisation de sites de grande étendue tels que des voiries ou quartiers, des galeries ou des espaces difficiles d’accès.

D’une manière générale, ce type de technologie se destine à toute mission de numérisation nécessitant de maîtriser les coûts, quitte à sacrifier la qualité.
Compte-tenu de la jeunesse de ce type de matériel et du coût de certaines technologies embarquées, les prix pratiqués restent assez élevés et oscillent généralement entre 80 000 et 150 000 €.
Notons toutefois que les composants embarqués dans les backpacks sont, pour la plupart, initialement développés pour répondre aux besoins des véhicules autonomes. La démocratisation de ces derniers conduira à la production massive de ces composants et donc à la réduction de leurs coûts, dont profiteront à terme les fournisseurs de solutions de mobile mapping et leurs clients.
2. Mobile mapping par appareil manuportable
La capture de réalité est une activité qui nécessite une grande adaptabilité, tant sur les méthodes que sur les outils employés pour la numérisation 3D. Compte-tenu des nombreuses caractéristiques définissant un site, et considérant la diversité des raisons pouvant pousser à mener la campagne de scanning, il est tout bonnement impossible de trouver un appareil capable d’être le meilleur en toutes circonstances.
C’est une des raisons pour lesquelles une frange très spécifique du marché de relevé laser 3D se détache autour du mobile mapping indoor. Ce créneau est occupé par des constructeurs de scanners tels que :

L’ambition est d’offrir les bénéfices du mobile-mapping à un niveau de prix bien inférieur aux solutions de type backpack.
Composition du matériel
Cette famille d’appareil se compose d’une tête LiDAR rotative, d’une centrale inertielle et d’un calculateur généralement déporté de la partie tenue à la main. Certains scanners de ce type sont également dotés d’une caméra frontale, laquelle permettra soit simplement de documenter la scène par des photos, soit parfois à coloriser le nuage de points.
Généralement, ces appareils sont dépourvus de GPS, l’ajout de points de calage devant se faire lors du post-traitement. Ce point peut être perçu comme une lacune (et d’un certain point de vue c’en est une) mais pour certaines applications 100% indoor telles que les numérisations de galeries, mines, bâtiments ou sous-sols, ce point n’est nullement dérangeant compte-tenu de l’absence de réception de signaux GPS.
Principe d'acquisition
Le scanner manuportable utilise les données issues du capteur LiDAR et les combine avec les données de la centrale inertielle (IMU). L'IMU est utilisée pour estimer une position initiale et créer un nuage de points à partir duquel les 'Surfels' sont extraits et servent de points de regroupement avec les autres nuages.
La trajectoire est ensuite calculée pour le prochain balayage de données à l'aide de l'IMU et de nouveaux «Surfels» sont à nouveau extraits de la même manière. La phase de traitement suivante de “cloud to cloud” (nuage contre nuage) consiste à trouver de manière itérative la meilleure corrélation possible entre deux ensembles de points dans le but de réduire l’écart type (on parle généralement de "RMS" ou "Root Mean Square" pour les nuages de points).
Les deux ensembles de Surfels sont utilisés pour faire correspondre les nuages de points, puis pour corriger et lisser l'estimation de la trajectoire. Au terme de ce processus d’affinage, le dernier nuage de points est recréé en fonction de la trajectoire optimisée.
Temps d’acquisition
La vélocité d'acquisition est assez similaire à celle atteignable avec des appareils de type backpack. L’arpenteur marche à une vitesse raisonnable en minimisant les mouvements non anticipés, et en respectant certains ralentissements à chaque “changement de monde” comme un passage de porte par exemple, qui forme un étranglement dans le nuage de points, et peut conduire à une rupture du nuage de points unifié s’il est franchi trop rapidement.
Coût du matériel
L’existence même de ce type d’appareils réside dans le fait que la plupart des solutions de scanning mobile ou fixe coûtent cher, sont techniquement complexes, et nécessitent des temps de captation ou de post traitement pouvant effrayer les structures peu habituées à ce genre de pratiques. Ces appareils sont d'apparence simple, maniables et faciles à prendre en main.
Les tarifs constatés sont quant à eux effectivement plus abordables que les solutions de type backpack et oscillent en moyenne entre 20 et 40 000 €.
Ces appareils sont destinés à une niche très spécifique, mais savent apporter une réponse opérationnelle à un niveau de prix cohérent. De ce fait, Ils comblent très bien la brèche laissée ouverte par les autres solutions de numérisation.
3. Mobile mapping type trolley
La grande famille des appareils de mobile mapping destinés à être déplacés par un humain voit une branche se séparer du reste du lot au travers de la notion de “chariot”, le terme anglo-saxon “trolley” étant plus fréquemment utilisé.
[qodef_blockquote text="Les solutions de mobile mapping par trolley se différencient essentiellement par le fait que l’appareil n’est ni porté sur le dos, ni à la main. Ici le scanner est doté de roues et se pousse tel un caddie de supermarché." title_tag="p" width=""]
Si cette configuration présente évidemment des inconvénients en termes de franchissements d'obstacles (des escaliers par exemple), la stabilité du matériel n’est pas sans avantages au regard de la qualité des données collectées. Voici donc une corde supplémentaire à ajouter à votre arc !
Composition du matériel
Les solutions de mobile-mapping sur trolley se présentent sous la forme de chariots à pousser par un humain. La partie haute accueille la(les) tête(s) LiDAR de type Velodyne, identique(s) à celles installées sur la plupart des autres solutions de mobile-mapping LiDAR.
Plusieurs caméras sont également présentes en partie haute et se chargent de prendre des photos haute résolution qui permettront par la suite de coloriser le nuage de points, et de proposer des visualisations immersives en bulles à 360°. La partie intermédiaire contient généralement un affichage en temps réel du nuage de points reconstitué, ainsi que les poignées pour saisir le trolley, alors que les parties inférieures contiennent les batteries et les calculateurs embarqués ainsi que le châssis et les roues de l’appareil.

Vous devez vous en douter, s’agissant d’une solution de mobile mapping, les trolleys contiennent là encore une centrale inertielle (IMU) permettant de retracer la trajectoire suivie par l'opérateur lors de la captation.
La marque NavVis propose des trolleys équipés de capteurs pour tracer les balises Bluetooth, les signaux WiFi et les données de champ magnétique, la localisation de ces informations pouvant être utile pour dresser différentes cartes indoor relatives à la qualité des signaux Wifi par exemple.
Principe d'acquisition
Les trolleys de mobile-mapping sont généralement assez encombrants et doivent être transportés dans plusieurs caisses volumineuses, une fourgonnette devra être prévue pour les déplacements.
Une fois assemblé, il ne reste plus qu’à initialiser l’appareil et ses capteurs en suivant la procédure préconisée par le fabricant. Une calibration de la boussole et de la centrale inertielle est souvent nécessaire à l’allumage.
[qodef_blockquote text="Le franchissement des obstacles doit être anticipé car vous ne pourrez pas franchir d’escaliers avec ce type d’appareil. " title_tag="p" width=""]
Les rampes n’étaient pas franchissables avec les premières générations de trolley car ceux-ci considéraient que, quoi qu’il arrive, il restaient sur une surface plane. Ce principe est désormais révolu et les rampes sont parfaitement gérées par le biais d’une détection de l’inclinaison réelle de l’appareil.

Généralement, derrière chaque faiblesse se cache un volte-face de stratégie commerciale.
Dans le cas des solutions trolley, les premiers grands utilisateurs sont les musées qui souhaitent proposer une numérisation de haute qualité dans le but de rendre possible des visites virtuelles en 3D et en réalité virtuelle.
[qodef_blockquote text="Les besoins primordiaux de ces clients étant liés à l’aspect des surfaces et à la qualité des textures photographiques, les fabricants de trolley ont mis l’accent sur ces caractéristiques." title_tag="p" width=""]
A l’inverse, les surfaces de ce type d’environnement étant généralement planes, et l’utilisateur n’ayant finalement que peu d’intérêt à savoir qu’il marche sur une légère pente, ces volets n’ont pas fait l’objet de développements poussés dans les premières versions du produit. Désormais (et le fait que vous me lisiez en est la preuve), de nombreuses industries, la construction par exemple, s’intéressent au mobile-mapping indoor y compris pour des espaces plus complexes que des musées.
Les fabricants ont donc adapté leurs appareils, qui gèrent désormais parfaitement les inclinaisons.
Temps d’acquisition
[qodef_blockquote text="En comparaison avec des solutions de mobile-mapping de type “backpack”, la vélocité de capture est bien moindre. Bien qu’il ne s’agisse pas de temps d’arpentage, les déplacements, temps de montage, et replis des trolleys sont assez importants. " title_tag="p" width=""]
Certaines configurations de bâtiments ne seront donc pas compatibles avec ce type de matériel, en cas d’absence d'ascenseur par exemple.
Cette transportabilité réduite va malheureusement de pair avec une vélocité réduite de capture. En effet, les trolleys ont besoin, pour la plupart, que l’opérateur marque des temps d’arrêt à intervalles réguliers. Malgré ces points potentiellement bloquants, il serait parfaitement injustifié de dresser un tableau noir de ces solutions de capture compte-tenu de la qualité exceptionnelle des nuages de points, tant par la densité que par le faible bruit des données, et l’excellente qualité de la colorimétrie.
Coût du matériel
Acquérir un scanner laser mobile trolley reviendra généralement trente à quarante pourcents moins cher qu’un backpack. Ce coût doit être majoré de certains logiciels applicatifs notamment ceux de visites immersives.
[qodef_blockquote text="La maniabilité réduite des chariots de scanning 3D ne joue pas en faveur de leur adoption massive dans le BTP, ce qui explique un prix inférieur aux sacs à dos sur le marché." title_tag="p" width=""]
En revanche, le haut niveau de qualité des données collectées les différencie nettement des appareils de numérisation à main et leur confère la capacité de répondre aux enjeux du monde de la construction, d’où un niveau de prix plus élevé.
4. Mobile-mapping sur véhicule
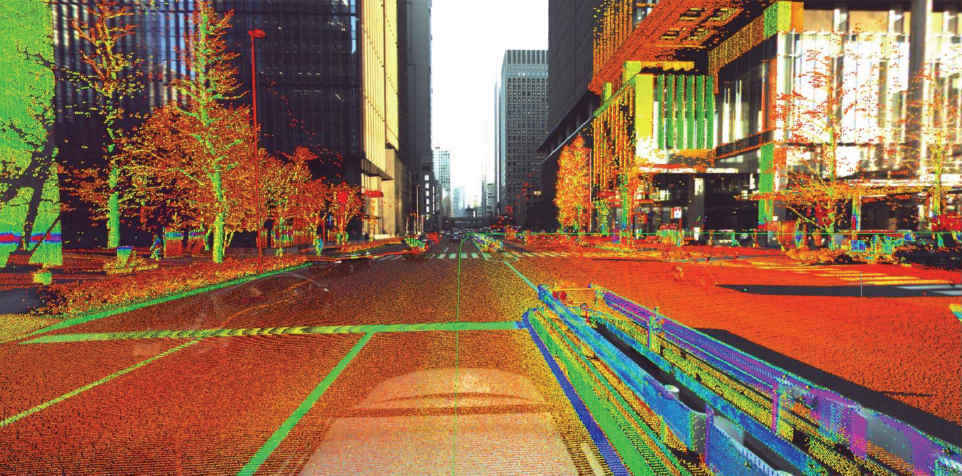
Toujours dans le domaine des méthodes de numérisation 3D mobile, un autre moyen de véhiculer un LiDAR est de l'installer sur une voiture.

Plus rapide qu’un humain et capable de numériser sur de plus longues distances, mais plus encombrante et moins polyvalente, voici les détails de cette autre solution de numérisation 3D.
Composition du matériel
Les appareils de mesure de cette catégorie sont destinés à être embarqués sur une voiture, à l’arrière d’un train ou de n’importe quel autre véhicule.
Ils utilisent un ou plusieurs scanners laser en combinaison avec des récepteurs GNSS (GPS) , IMU (station inertielle) et DMI (capteur de roue). Des appareils photo sont implantés sur toute la périphérie de l’appareil, afin de coloriser les nuages de points et de réaliser des bulles photographiques à 360 degrés.
Souvent, des capteurs additionnels permettent de compléter la campagne et de trouver d’autres sources de valorisation des données : analyse du ciel et du sol (chaussée, trottoir), capteurs de pollution sonore, capteurs de qualité d'air, radar à pénétration de sol (GPR) pour la cartographie ou encore mesure des ambiances lumineuses.
Cette solution mobile-mapping répond de fait au concept de solution multi-capteurs, et permet ainsi aux agglomérations et concessionnaires de collecter massivement des informations relatives à leurs infrastructures.
Principe d'acquisition
L’installation est assez simple et consiste en la fixation de l’unité de mesure sur le véhicule retenu. La calibration des capteurs de roue sera ensuite nécessaire pour fiabiliser les informations relatives au positionnement de l’appareil en cours de mesure.
En effet, comme toute solution de mobile-mapping, le LiDAR collecte des points affectés à une heure précise de captation, laquelle est liée à une position calculée. La redondance des capteurs destinés à cette fin, GNSS, centrale inertielle et capteur de roues, permet de fiabiliser au maximum l’estimation de position, et donc la précision des données de numérisation. Les nuages de points sont assemblés à la volée via l’ordinateur présent à l’intérieur du véhicule permettant d’avoir une visibilité sur l’intégrité du nuage de points.
Temps d’acquisition
Le temps d’acquisition dépend essentiellement de la longueur du trajet, le véhicule devant rouler à une vitesse légèrement inférieure à la normale. Cette réduction de vitesse ne se fait que peu sentir en agglomération mais a un impact en cas de trajets sur de grands axes.
Numériser à la vitesse d’un véhicule en marche est un indéniable atout pour les projets linéaires ne pouvant prétendre être scannés à dos d’humain ou par scanners laser 3D en stations fixes.
Coût du matériel
Ce type de solutions ne trouvera de sens que pour les projets de très grande envergure compte-tenu de son coût élevé.
Le numériseur, l’ensemble de ses capteurs et logiciels associés, représentent un investissement de plusieurs centaines de milliers d’euros. Il faudra également considérer une équipe de deux personnes à temps plein lors de la numérisation : un conducteur et un technicien validant la collecte des données en temps réel. Cette famille de matériel et personnes constitue la solution la plus onéreuse de numérisation 3D mobile terrestre, mais offre également les meilleures performances dans le cadre de scans de grande ampleur.
Conclusion
Les solutions de numérisation mobiles sont moins courantes que les scanners laser 3D fixes. Pourtant elles sont bien plus pertinentes dans de nombreux cas.
Et vous, quels sont vos besoins de numérisation 3D ? Pensez-vous que les solutions mobiles puissent y répondre ?
Bonjour,
Rapport très complet et très bien construit !
Bravo !!
Je suis à la recherche d’un système permettant de constituer une représentation 3D d’un parcours pour un guidage en Indoor.
1 Ne pas utiliser de cibles
2 Arpentage avec sac à dos.
3 Mixte Photos + localisation pour assemblage
4 Précision non capitale
5 Si possible dimensionner les pièces, couloirs …, et plan 2 D
Dois je continuer à rêver ou est ce jouable et avec quel matériel ?
Merci
J
Bonjour, merci pour votre commentaire et vos félicitations.
Ce que vous décrivez est totalement jouable, mais pouvez-vous me préciser exactement quel type d’environnement fera l’objet de cette numérisation ?
Dans l’attente, je peux répondre techniquement sur chaque point.
1. Ne pas utiliser de cible
Cela implique de réaliser l’assemblage des scans en mode « cloud to cloud« . La corrélation entre la géométrie de chaque nuage est utilisée pour remplacer les cibles : les surfaces planes et les formes caractéristiques aident le processus. En numérisation 3D mobile, on parle de « SLAM visuel« . L’intégration d’une centrale inertielle dans le scan 3D permet d’aider le SLAM dans les zones où l’aspect visuel de la scène ne suffit plus. Ce sont alors les mouvement de l’opérateur qui aident à comprendre la trajectoire.
2. Arpentage avec sac à dos
Voir les solutions type backpack.
3. Mixte Photos + localisation pour assemblage
Merci de préciser ce point.
4. Précision non capitale
Il est effectivement important d’avoir conscience de cette faiblesse du mobile-mapping. Les solutions de scan mobile ont tendance à produire des données « bruitées ».
Si possible dimensionner les pièces, couloirs …, et plan 2 D
N’importe quel nuage de points ou mesh vous permettra de le faire, tous les scanners 3D fixes ou mobiles ont cette capacité.
C’est totalement jouable, avec les matériels décrits dans cet article. Pour vous répondre à « quel est le bon matériel », merci de me préciser la nature de l’espace à numériser.
Cordialement.
Bonjour,
Nous avons un système unique qui permet la localisation temps réel en 6 dimensions avec tous systèmes de scan ou autres solutions connexes.
Cette technologie permet une précision centimétrique (voir moins) et n’emploie pas de centrale inertielle.
Plus d’info contact [at] directopo.com
Bravo pour votre site web, il est formidable. Il faudrait ajouter un nouveau type de scanner 3D mobile: le NavVis VLX. Ça n’est pas un backpack, puisqu’il se porte vers l’avant.