Nous avons vu différentes technologies, méthodes et outils de numérisation 3D. Certains scannent en stations fixes et d’autres ont la capacité de scanner en mouvement.
Cette seconde branche d’activité, généralement désignée sous l’appellation “mobile-mapping”, exploite différents types capteurs pour définir une position dans l’espace et donc une origine géographique à chaque point mesuré.
Les centrales inertielles et les capacités de SLAM intégrées aux scanners mobiles présentent un risque de dérive au cours des déplacements de l’arpenteur.

Pour palier à ce problème, penchons-nous sur les outils de géopositionnement qui permettent de fiabiliser les données 3D en ajoutant des informations spatiales aux modèles 3D.
Géopositionnement via les systèmes GNSS
L’acronyme “GNSS” provient de l’expression “Global Navigation Satellite System” et désigne un système de positionnement par satellites.
[qodef_blockquote text= »Un GNSS se définit comme un ensemble de composants reposant sur une constellation de satellites artificiels et ayant pour finalité de déduire la position sur le globe de l’appareil récepteur. » title_tag= »p » width= » »]Généralement les systèmes GNSS de couverture mondiale ouverts au grand public tels que le GPS ou le GLONASS proposent un positionnement d’une précision décamétrique. Les entités notamment militaires bénéficient de fréquences dédiées ayant un niveau de précision bien supérieur.

Des GNSS plus récents tels que GALILEO proposent notamment des niveaux de précision accrus via un accès payant à des fréquences supplémentaires. Par ailleurs, certains systèmes d’augmentation et de fiabilisation de portée régionale ou mondiale, gratuits ou payants, permettent d’améliorer la précision des positions.
Le principe de fonctionnement des systèmes GNSS repose sur la “trilatération” (méthode mathématique permettant de déterminer la position relative d’un point en utilisant la géométrie des triangles) de signaux électromagnétiques synchronisés émis par les satellites.

Le système de radiolocalisation Navstar / GPS (Global Positioning System) a été développé par les Etats-Unis (Département de la Défense) à partir de 1973 pour offrir aux utilisateurs (prioritairement l’armée américaine) la possibilité de déterminer de façon précise leurs coordonnées en tout point de la surface de la Terre. Les satellites ont été mis sur orbite à partir de 1978 et le système Navstar / GPS a été déclaré totalement opérationnel en 1994.

De nombreux satellites ont été mis sur orbite depuis les années 80. La durée de vie estimée pour chacun d’entre eux est de l’ordre de 7 ans.
Pour maintenir le caractère opérationnel de cette constellation de 24 satellites, il est nécessaire d’effectuer des lancements périodiques, qui sont également l’occasion de bénéficier des avancées technologiques pour améliorer la précision globale du système, notamment en ajoutant de nouvelles fréquences publiques ou restreintes à certains usages. L’ensemble du système GPS est supervisé dans la “Master Control Station” située aux Etats-Unis dans le Colorado et relayé par une vingtaine d’antennes et stations de poursuite au sol tout le tour du globe.
[qodef_blockquote text= »Les signaux transmis par les satellites peuvent être librement reçus et exploités par quiconque. » title_tag= »p » width= » »]L’utilisateur, qu’il soit sur terre, sur mer ou dans les airs, peut connaître sa position à toute heure et en tout lieu sur la surface ou au voisinage de la surface de la terre dès lors qu’il est équipé d’un récepteur GPS et du logiciel nécessaire au traitement des informations reçues.
GLONASS
Le GNSS “GLONASS” déployé par la Russie signifie “système global de navigation satellitaire” et utilise actuellement vingt-quatre satellites circulant sur une orbite moyenne.
La naissance de ce système intervient sur fond de Guerre Froide pour des raisons stratégiques évidentes.

Le système devient opérationnel en 1996, mais la crise financière et économique qui frappe la Russie à la fin des années 1990 ne lui permet plus de maintenir un nombre suffisant de satellites .
[qodef_blockquote text= »La constellation a été progressivement renouvelée entre 2008 et 2014 par l’envoi de nouveaux satellites, et la couverture mondiale du système a été rétablie le 8 décembre 2011. » title_tag= »p » width= » »]Le système GLONASS offre actuellement une précision de 5 à 8 mètres avec sept à huit satellites en vue. Le GPS offre une précision de 2 à 9 mètres avec six à onze satellites en vue.
Certaines études ont mesuré la précision de localisation du système GLONASS à 2,80 m près. Dans le même temps, le système GPS offrait une précision à 3,35 m.
Bien sûr, ces chiffres ne sont pas identiques dans tous les endroits du globe, et le GLONASS prendrait un réel avantage sur son concurrent dans les hautes latitudes.
BEIDOU / COMPASS 2
BEIDOU est l’alternative chinoise du GPS et du GLONASS.
Ce GNSS également nommé COMPASS a commencé à être déployé en 2000 et a été déclaré opérationnel en 2003 sur une partie du globe couvrant la Chine et les régions avoisinantes avec une précision d’environ 100 mètres.
Une deuxième génération du système, Beidou-2 dont le déploiement est encore en cours, se destine à une couverture mondiale assurée par trois types de satellites :
- 5 satellites en orbite géostationnaire,
- trois en orbite géosynchrone inclinée,
- et 27 en orbite moyenne.

Les performances à terme de Beidou-2 seront comparables aux trois autres systèmes mondiaux opérationnels (GPS et GLONASS) ou en cours de déploiement (Galileo).
GALILEO
GALILEO est un système de positionnement par satellites développé par l’Union européenne et sera constitué à terme de 30 satellites dont 6 de rechange.
Chaque satellite circule sur une orbite moyenne dans trois plans orbitaux distincts, émet un signal qui lui est propre, et retransmet un signal de navigation fourni par le segment de contrôle de Galileo constitué par deux stations de surveillance.
[qodef_blockquote text= »Le projet Galileo est lancé le 26 mai 2003 avec pour motivation principale de mettre fin à la dépendance de l’Europe vis-à-vis du système américain NAVSTAR GPS. » title_tag= »p » width= » »]Les premiers services de Galileo sont opérationnels depuis le 15 décembre 2016 et le déploiement de nouveaux satellites suit son cours.
[qodef_blockquote text= »Le système est sous contrôle strictement civil, contrairement aux autres GNSS existants qui sont eux sous contrôle militaire. » title_tag= »p » width= » »]Galileo diffuse ses signaux sur 3 bandes de fréquences et en utilise des combinaisons variées pour distinguer 4 catégories d’utilisation :
- “les services gratuits”, qui bénéficient d’une précision horizontale de moins de 5 mètres et verticale de moins de 35 mètres,
- “le service commercial”, qui bénéficie d’une précision inférieure à 1 mètre et peut être complété par des signaux provenant de stations terrestres pour atteindre une précision inférieure à 10 cm,
- “le service public réglementé”, qui désigne les utilisateurs remplissant une mission de service public très dépendants de la précision, de la qualité du signal, et de la fiabilité de sa transmission, tels que les services d’urgence. Afin que ce service soit disponible en tout temps, il utilise deux signaux à part et dispose de plusieurs systèmes prévenant un brouillage ou un leurrage du signal. Il est également chiffré et disponible seulement sur des récepteurs spécifiques,
- “le service de recherche et secours”, qui bénéficie de fréquences dédiées.
Après avoir tenté de faire annuler le projet pour des raisons stratégiques plus ou moins avouées, les États-Unis et l’Union Européenne ont finalement signé le 26 juin 2004 un accord final permettant l’interopérabilité technique de Galileo avec le GPS afin de pouvoir utiliser les systèmes Galileo et GPS avec un même récepteur.

Ainsi, si un des systèmes vient à avoir des défaillances, le second prend le relai de façon transparente.
Combinaison de plusieurs GNSS
Dans le langage courant, on utilise le terme GPS pour désigner un appareil capable de se géo-positionner alors même que nous devrions parler de GNSS.
[qodef_blockquote text= »C’est en effet le GPS qui a démocratisé les applications civiles et son nom a été associé à la technologie. » title_tag= »p » width= » »]Au delà de la question sémantique, cette erreur conduit souvent à une méconnaissance de la globalité des offres de services de géolicalisation reposant sur des GNSS alternatifs.
[qodef_blockquote text= »Pourtant la combinaison de plusieurs GNSS permet d’accroître considérablement la précision du calcul de position. » title_tag= »p » width= » »]Par exemple, un appareil compatible avec le GPS et le GLONASS pourra bénéficier d’environ 55 satellites. Bien que l’amélioration de la précision ne soit pas proportionnelle au nombre de satellites, le temps de réponse est considérablement amélioré.
La compatibilité technique des puces embarquées dans vos différents appareils de numérisation 3D, qu’ils soient drones ou backpacks, avec un maximum de systèmes GNSS, est donc un facteur important à prendre en compte.
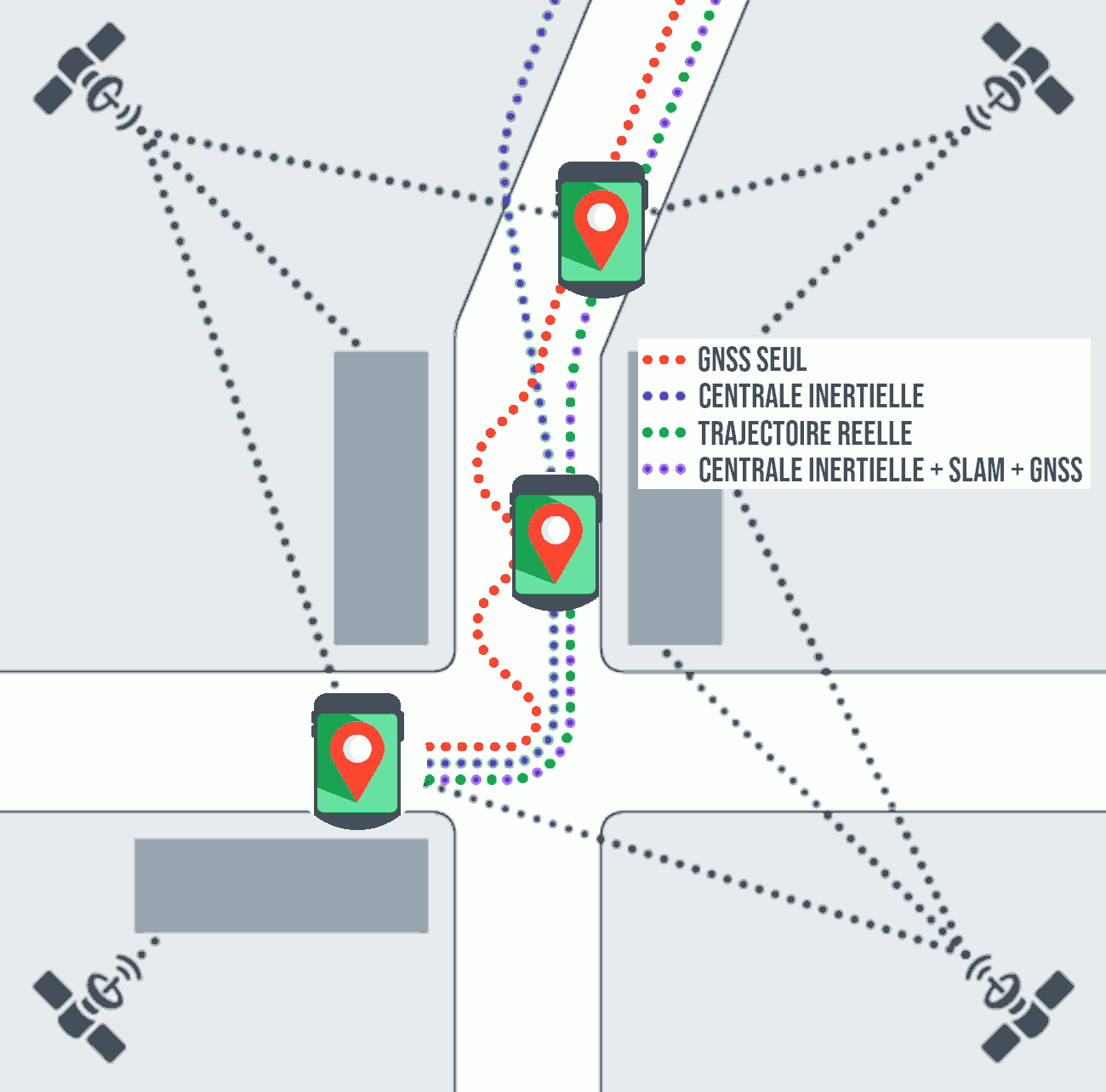
Combiner les informations provenant de plusieurs GNSS avec celles de la centrale inertielle et des capacités de SLAM de l’appareil de scan 3D mobile améliore la fiabilité du positionnement et des nuages de points récoltés.
Les systèmes d’augmentation locaux (RTK…)
La Cinématique temps réel (Real Time Kinematic, en anglais ou RTK) est une technique de positionnement par satellite basée sur l’utilisation de mesures de la phase des ondes porteuses des signaux émis par les systèmes GNSS. Une station de référence fournit des corrections en temps réel permettant d’atteindre une précision de l’ordre du centimètre.

En pratique, les systèmes RTK utilisent un récepteur fixe (station de base dont la position est connue précisément) et un certain nombre de récepteurs mobiles.
La station de base compare la position calculée à partir du signal GPS et la position réelle, puis réémet les corrections à apporter vers les récepteurs mobiles. Cela permet aux unités mobiles de calculer leur position relative avec une précision de quelques millimètres, bien que leur position absolue soit aussi précise que la position de la station de base.
La précision nominale typique pour ces systèmes est de 1 cm horizontalement et 2 cm verticalement. L’utilité de la technique RTK est très limitée en navigation générale mais s’avère très utile pour des applications de topographie ou de surveillance de site, cadre dans lequel la numérisation 3D trouve sa place.
Bonjour, pourquoi peut-il exister de telles différences de prix entre différents systèmes RTK ?